|
Pezzi: 381
Larghezza: cm. 22,80
Profondità:Lunghezza: cm. 16,41
Altezza: cm. 28,10
Peso (senza batterie): 923 gr.
Peso (con 6 batterie 1,5V): 1085 gr. (1,085 kg.)
Kit: LEGO® NXT
Serie: LEGO® MINDSTORMS
Componenti elettrici: n.1 NXT, n.1 sensore di contatto,
n.1 sensore di suono, n.1 sensore ad ultasuoni, n.3 motori
Pezzi aggiuntivi: NO.
|
NEW
Visita la nostra pagina su
Brickshelf
Wall-eNXT è un robot che abbiamo voluto realizzare dopo aver visto il film al cinema.
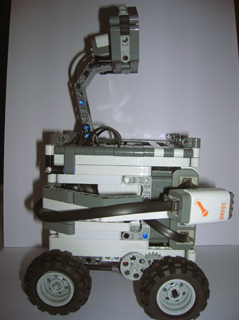
 Lo abbiamo costruito utilizzando esclusivamente i pezzi contenuti nel KIT LEGO® NXT della serie MINDSTORMS.
Lo abbiamo costruito utilizzando esclusivamente i pezzi contenuti nel KIT LEGO® NXT della serie MINDSTORMS.
I componenti elettrici utilizzati sono i seguenti:
* n° 3 Motori (2 (B-C) per il movimento e 1 (A) per la testa)
* n° 1 Sensore di contatto (mano destra)
* n° 1 Sensore di suono (mano sinistra)
* n° 1 Sensore ad ultrasuoni (testa)
* n° 4 cavi 35mm (motori B-C, sensori di contatto e di suono)
* n° 1 cavo 20mm (motore A)
* n° 1 cavo 50mm (sensori ad ultrasuoni)
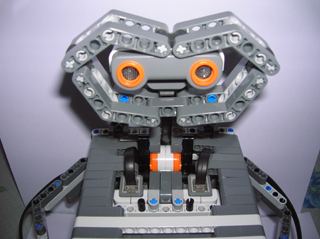
Il Robot è composto dal Mattoncino intelligente NXT, da una base con all'interno i motori e gli ingranaggi necessari per il movimento, da due braccia e da una testa.

 Mattoncino intelligente NXT: E' l'unità di controllo (computer) di tutto il Robot che con il programma software gestisce motori, sensori e quindi il completo funzionamento di Wall-eNXT.
Mattoncino intelligente NXT: E' l'unità di controllo (computer) di tutto il Robot che con il programma software gestisce motori, sensori e quindi il completo funzionamento di Wall-eNXT.
Per questo progetto è stato utilizzato un software sviluppato con NXT-G, il programma fornito di serie dalla Lego con il KIT.
BASE: E' la struttura portante di tutto il robot sulla quale sono montati i motori e gli ingranaggi per il movimento, oltre al motore per il movimento della testa.
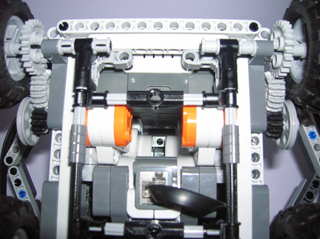
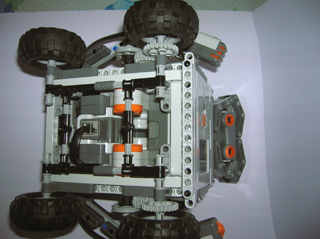 I MOTORI B-C sono azionati separatamente e permettono di far muovere Wall-eNXT in avanti/indietro e di girare a destra/sinistra. Ogni motore è collegato a una ruota con un sistema di trasmissione ad ingranaggi (rapporto 1/2).
I MOTORI B-C sono azionati separatamente e permettono di far muovere Wall-eNXT in avanti/indietro e di girare a destra/sinistra. Ogni motore è collegato a una ruota con un sistema di trasmissione ad ingranaggi (rapporto 1/2).
Il MOTORE A permette il movimento della testa in avanti/indietro.
BRACCIO DESTRO: Sulla mano è montato il sensore di contatto (collegato all'ingresso 1 dell'NXT). Quando viene premuto, Wall-eNXT chiama EVE, muove la testa e comincia ad andare velocemente avanti/indietro.
 BRACCIO SINISTRO: Sulla mano è montato il sensore di suono (collegato all'ingresso 2 dell'NXT). Quando Wall-eNXT sente un suono, inizia a muoversi.
BRACCIO SINISTRO: Sulla mano è montato il sensore di suono (collegato all'ingresso 2 dell'NXT). Quando Wall-eNXT sente un suono, inizia a muoversi.
TESTA: Per la faccia di Wall-eNXT è stato utilizzato il sensore ad ultrasuoni (collegato all'ingresso 4 dell'NXT). Quando qualcuno/qualcosa si avvicina al viso, saluta dicendo il suo nome.
Note importanti per il corretto funzionamento di Wall-eNXT:
- Innanzitutto accertatevi del corretto movimento dei motori.
- Posizionate la testa di Wall-eNXT perfettamente in verticale.
- Scaricate il software (realizzato con NXT-G) e caricatelo sul Robot.
- Scaricate la voce di Wall-eNXT e caricatela nella directory "\Programmi\LEGO Software\LEGO MINDSTORMS NXT\engine\Sounds".
I file sono 2 (wallenxt.rso e evenxt.rso).
- A questo punto accendete Wall-eNXT e..... godetevi lo spettacolo ........
- Se ci siete riusciti vi auguriamo !!!!!!!!! BUON DIVERTIMENTO !!!!!!!!!!!. Valter e Samuele
|





