La trasformazione di Lorentz
Prima di esaminare la trasformazione di Lorentz, consideriamo brevemente il concetto di quadrivettore, o 4-vettore. Per 4-vettore si intende una freccia nello spazio-tempo tetradimensionale. Dato un sistema di quattro assi ortogonali con origine sulla parte posteriore della freccia, un 4-vettore può essere rappresentato dalle proiezioni, o componenti, della sua punta sugli assi ortogonali del sistema di coordinate (nota: per semplicità mi limito a considerare il caso in cui gli assi siano ortogonali). Il grafico sottostante mostra un vettore e le sue componenti nel caso più semplice di uno spazio a tre dimensioni.
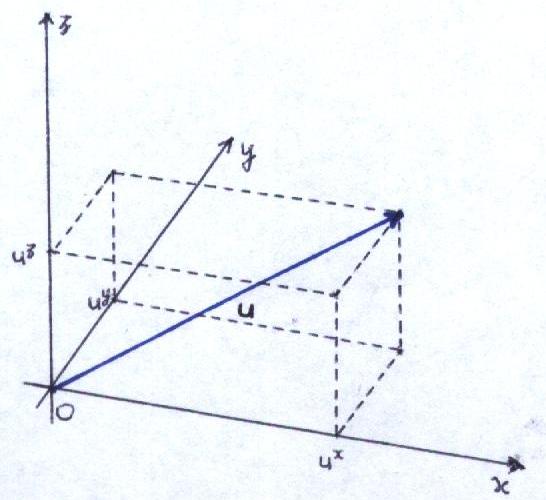
Per indicare un vettore di tipo spazio useremo la notazione abbreviata u, e ux, uy, uz per le sue componenti lungo gli assi x, y, z. A volte è utile porre le componenti tra parentesi, come in (ux, uy, uz). Un'altra utile notazione è ui, dove la lettera latina i (oppure j, k, ecc.) posta come apice può assumere uno qualsiasi dei valori 1, 2 e 3, i quali stanno a rappresentare x, y e z. In riferimento ai vettori di tipo spazio, le notazioni u, ui, (u1, u2, u3) e (ux, uy, uz) si equivalgono. Per quanto riguardo i 4-vettori dello spazio-tempo è consuetudine usare la notazione uμ, dove la lettera greca μ (pronuncia 'mu') può assumere qualsiasi valore intero compreso tra 0 e 3, con la convenzione che u0 sta ad indicare la componente di tipo tempo. Perciò uμ, (u0, u), (u0, u1, u2, u3) e (ut, ux, uy, uz) sono notazioni differenti che rappresentano lo stesso 4-vettore. A volte gli indici possono apparire nella parte inferiore, come in uμ. Non ne spiego qui il motivo: accettali come sono.
Consideriamo la trasformazione di Lorentz, la legge che specifica il modo in cui gli intervalli spaziali e temporali si trasformano nel passare da un sistema di riferimento ad un altro. Lorentz introdusse la sua legge di trasformazione in modo che fosse in accordo con le leggi dell'elettromagnetismo. Infatti, prima di questa legge erano sorte difficoltà con la teoria dell'elettromagnetismo per il fatto che le sue leggi apparivano dipendere dal sistema di riferimento, il che spinse Michelson e Morley a compiere il loro famoso esperimento. In quel tempo si pensava che la legge scoperta da Lorentz si applicasse solo all'elettromagnetismo. Solo con la pubblicazione della teoria della relatività da parte di Einstein apparve chiaro che la legge di Lorentz andava applicata a tutti i fenomeni fisici (tutto è relativo). Vedremo meglio questo aspetto in un prossimo capitolo, quando sarà trattata la teoria della relatività. Per il momento andiamo ad esaminare la legge a cui sono soggette le componenti spaziali e temporali dei quadrivettori quando si cambia sistema di riferimento. Nell'ottenerla useremo le seguenti espressioni ricavate in La contrazione dello spazio:
(6.1): tf' = ( L' / c ) / ( 1 – v / c ) = ( L / c ) · √( 1 – v2 / c2 ) / ( 1 – v / c ),
(6.2): tb' = ( L' / c ) / ( 1 + v / c ) = ( L / c ) · √( 1 – v2 / c2 ) / ( 1 + v / c ),
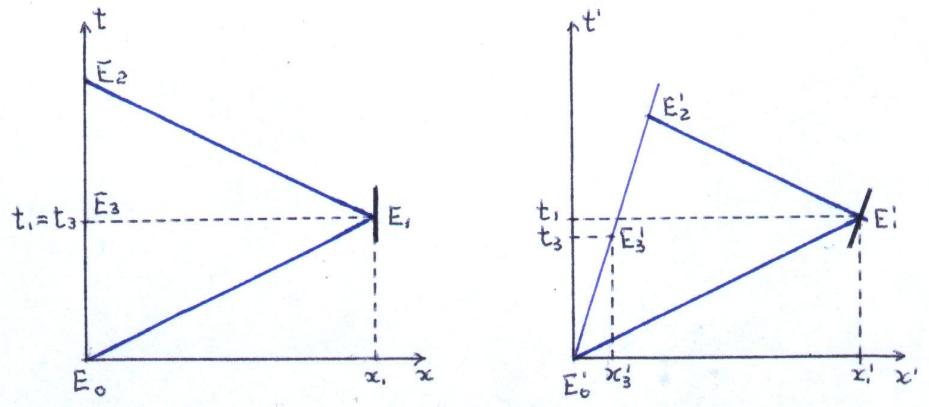
Per esprimere le componenti spaziali e temporali dei 4-vettori del sistema a riposo in termini di quelle dell'altro (vedi grafici), consideriamo le coordinate dell'evento E1': t1' e x1'. Nel riferimento del treno il vettore E1 – E0 è la somma del vettore puramente temporale, E3 – E0, e di quello puramente spaziale, E1 – E3. Le coordinate del primo vettore sono E3 – E0 = (t3, 0) = (t1, 0) e quelle del secondo vettore sono E1 – E3 = (t1 – t3, x1) = (0, x1). I vettori corrispondenti nel sistema a riposo sono E3' – E0' = (t3', x3') e E1' – E3' = (t1' – t3', x1' – x3').
Proponiamoci ora di determinare t3' in termini di t3. Ricordando che t3' = ( tf' + tb' ) / 2 e usando (6.1) e (6.2) otteniamo:
(6.3): t3' = ( L / c ) / √( 1 – v2 / c2 ).
Di conseguenza:
(6.4): x3' = v · t3' = ( v · L / c ) / √( 1 – v2 / c2 ).
Nel riferimento sul treno E3 – E0 è puramente temporale. Perciò in (6.3) e (6.4) poniamo t1 (= t3) al posto di L / c:
t3' = t1 / √( 1 – v2 / c2 ),
x3' = ( v · t1 ) / √( 1 – v2 / c2 ).
Ciò che abbiamo ottenuto in (6.3) and (6.4) ci aiuta a ricavare anche le componenti temporale e spaziale di E1' – E3'. Dopo qualche calcolo giungiamo a:
t1' – t3' = tf' – t3' = ( v · L / c2 ) / √( 1 – v2 / c2 ),
x1' – x3' = c · tf' – v · t3' = L / √( 1 – v2 / c2 ).
Nel riferimento del treno, l'intervallo L è di tipo spazio. Perciò sostituiamo L con x1:
(6.5): t1' – t3' = ( v · x1 / c2 ) / √( 1 – v2 / c2 ),
(6.6): x1' – x3' = x1 / √( 1 – v2 / c2 ).
Infine, sommando (6.3) e (6.5) otteniamo:
t1' = ( t1 + x1 · v / c2 ) / √( 1 – v2 / c2 ),
mentre la somma di (6.4) e (6.6) produce:
x1' = ( x1 + v · t1 ) / √( 1 – v2 / c2 ).
Questa è la trasformazione di Lorentz delle due coordinate t1 e x1. Nella letteratura di solito si usa il simbolo γ (pronuncia 'gamma') al posto di 1 / √( 1 – v2 / c2 ). Operando la sostituzione, togliendo l'indice 1 da t1 e x1 e ricordando che le coordinate y e z non sono influenzate dal moto, la trasformazione di Lorentz completa per questo caso particolare acquista la seguente forma:
(6.7): t' = ( t + x · v / c2 ) · γ;, x' = ( x + v · t ) · γ, y' = y, z' = z.
Prima dello sviluppo delle teorie dell'elettromagnetismo e della relatività si riteneva che il tempo non fosse influenzato dal moto dell'osservatore: (t' = t). La correzione operata da γ su x' è molto piccola per velocità ordinarie. É un effetto puramente relativistico che si manifesta in particolar modo ad alte velocità. Senza il fattore γ e con t' = t la formula è conosciuta come trasformazione di Galilei, e va applicata quando gli effetti relativistici sono trascurabili. Si dovrebbe osservare che il fattore γ influenza sia la coordinata spaziale nella direzione del moto che quella temporale, il che significa che il moto le dilata entrambe. Riguardo allo spazio, ciò che viene contratta non è la proiezione della distanza L presa ortogonalmente all'asse x, ma la sua proiezione lungo la direzione di moto del treno nel piano (t', x').
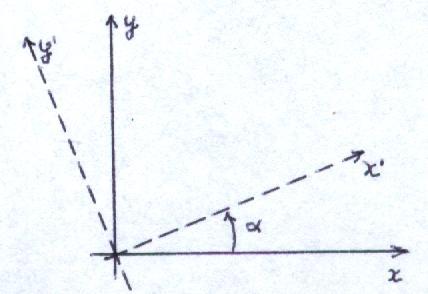
A voler essere rigorosi la trasformazione (6.7) non è la più generale, ma quella a cui di solito ci si riferisce quando si parla di trasformazione di Lorentz, perché è quella parte della trasformazione più generale che differisce dalla corrispondente trasformazione di Galilei. Una generica trasformazione di Lorentz include le rotazioni, ossia, la più generale trasformazione di Lorentz è una combinazione di molteplici rotazioni e di una trasformazione tipo quella che abbiamo ricavato. Per completezza mostro senza dimostrazione un esempio di rotazione. Dato un angolo di rotazione α nel piano (x, y), ecco come vengono trasformati gli assi x e y:
x' = x · cos(α) + y · sin(α), y' = – x · sin(α) + y · cos(α).
The Lorentz transformation
Before considering the Lorentz transformation, let's briefly examine the concept of 4-vector. By 4-vector we mean an arrow in four-dimensional space-time. Given a set of four orthogonal axes with origin on the back of the arrow, the 4-vector can be represented by its projections, or components, on the orthogonal axes of the system of coordinates (note: the axes do not necessarily need to be orthogonal, but for simplicity we limit ourselves to this particular case). The graph below shows a vector and its components in the simpler case of a three dimensional space.
Ordinarily, the notation u is used for short to indicate a space-like vector, and ux, uy, uz for its components along the x, y, z axes. Sometimes it's convenient to put the components within brackets, like (ux, uy, uz). Another useful notation for a vector is ui, where the upper Latin letter i (or j, k, etc.) may take any of the values 1, 2 and 3, and such indices stand for x, y and z. In the case of space-like vectors, the notations u, ui, (u1, u2, u3) and (ux, uy, uz) are equivalent. In dealing with 4-vectors related to space-time, it's customary to use the notation uμ, where a Greek letter like μ (pronunciation 'mu') may take any integer value from 0 to 3, with the understanding that u0 stands for the time component. Then uμ, (u0, u), (u0, u1, u2, u3), and (ut, ux, uy, uz) are different notations representing the same 4-vector. Sometimes the indices may appear below, like uμ. I do not explain here why: take the notations as they come.
Let's consider the Lorentz transformation, the law that specifies the way space and time intervals transform in passing from one system of reference to another. Lorentz brought forward his transformation law in order that it be in agreement with electromagnetism. In fact, prior to this law, difficulties had arisen with the electromagnetic theory, due to the fact that the electromagnetic laws appeared to depend on the frame of reference, a fact that led to the Michelson and Morley experiment. When discovered, the Lorentz transformation was thought to be applicable only to electromagnetism. Only with the publication of the Einstein's theory of relativity it became clear that it applied to all physical phenomena. We shall see better this aspect in a future chapter, when the theory of relativity will be considered. As for now, we simply take into account the transformation law to which the space and time components of 4-vectors are subject in changing system of reference. In deriving it, we'll use the following expressions we obtained in The space contraction:
(6.1): tf' = ( L' / c ) / ( 1 – v / c ) = ( L / c ) · √( 1 – v2 / c2 ) / ( 1 – v / c ),
(6.2): tb' = ( L' / c ) / ( 1 + v / c ) = ( L / c ) · √( 1 – v2 / c2 ) / ( 1 + v / c ),
In order to express the space and time components of the 4-vectors of the primed system in terms of the other ones (see graphs), let's consider the coordinates of event E1': t1' and x1'. In the train system, the vector E1 – E0 is the sum of the purely time-like vector, E3 – E0, and the purely space-like vector, E1 – E3. The coordinates of the first vector are E3 – E0 = (t3, 0) = (t1, 0) and those of the second vector are E1 – E3 = (t1 – t3, x1) = (0, x1). The corresponding vectors in the primed system are E3' – E0' = (t3', x3') and E1' – E3' = (t1' – t3', x1' – x3').
Let's determine t3' in terms of t3. By remembering that t3' = ( tf' + tb' ) / 2 and by using (6.1) and (6.2) we obtain:
(6.3): t3' = ( L / c ) / √( 1 – v2 / c2 ).
Consequently:
(6.4): x3' = v · t3' = ( v · L / c ) / √( 1 – v2 / c2 ).
In the train system, E3 – E0 is purely time-like, so in (6.3) and (6.4) we put t1 (= t3) in place of L / c:
t3' = t1 / √( 1 – v2 / c2 ),
x3' = ( v · t1 ) / √( 1 – v2 / c2 ).
What we got in (6.3) and (6.4) helps us derive also the components of E1' – E3'. After some calculations we get:
t1' – t3' = tf' – t3' = ( v · L / c2 ) / √( 1 – v2 / c2 ),
x1' – x3' = c · tf' – v · t3' = L / √( 1 – v2 / c2 ).
In the train system, the interval L is space-like. So we substitute L with x1:
(6.5): t1' – t3' = ( v · x1 / c2 ) / √( 1 – v2 / c2 ),
(6.6): x1' – x3' = x1 / √( 1 – v2 / c2 ).
Finally, by adding up (6.3) and (6.5) we get:
t1' = ( t1 + x1 · v / c2 ) / √( 1 – v2 / c2 ),
while by adding up (6.4) and (6.6) we get:
x1' = ( x1 + v · t1 ) / √( 1 – v2 / c2 ).
This is the Lorentz transformation for the two coordinates t1 and x1. Usually in the literature people use the symbol γ (pronunciation 'gamma') in place of 1 / √( 1 – v2 / c2 ). By making the substitution, by dropping the index 1 from t1 and x1, and by remembering that the coordinates y and z are not affected by the motion, the complete Lorentz transformation for this particular case gets the following form:
(6.7): t' = ( t + x · v / c2 ) · γ;, x' = ( x + v · t ) · γ, y' = y, z' = z.
Before the advent of electromagnetism and relativity, time was thought to remain unaffected by the motion of the observer (t' = t). The correction operated here, which is very small for ordinary velocities, is a purely relativistic effect, which manifests particularly when high velocities are involved. Without the factor γ the formula is known as the Galilei transformation, and applies whenever the relativistic effects are negligible. It should be noted that both the space coordinate in direction of motion and the time coordinate are affected by the factor γ, which means that they are both dilated by motion. What gets contracted is not the space coordinate, but the projection of the distance L taken not orthogonally to the spatial axis, but along the train direction of motion in the (t', x') plane.
Speaking rigorously, transformation (6.7) isn't the most general one, but it's the one people usually refer to when speaking about Lorentz transformations, because it's the one that differs from the corresponding Galilei transformation. The general Lorentz transformation may include rotations, that is, the most general Lorentz transformation is a combination of multiple rotations and a transformation like the one we derived. For completeness I show without proof an example of rotation. Given an angle of rotation α in the plane (x, y), here's how the x and y axes transform:
x' = x · cos(α) + y · sin(α), y' = – x · sin(α) + y · cos(α).