Robot Validation Map[2006.10.08] |
|
|
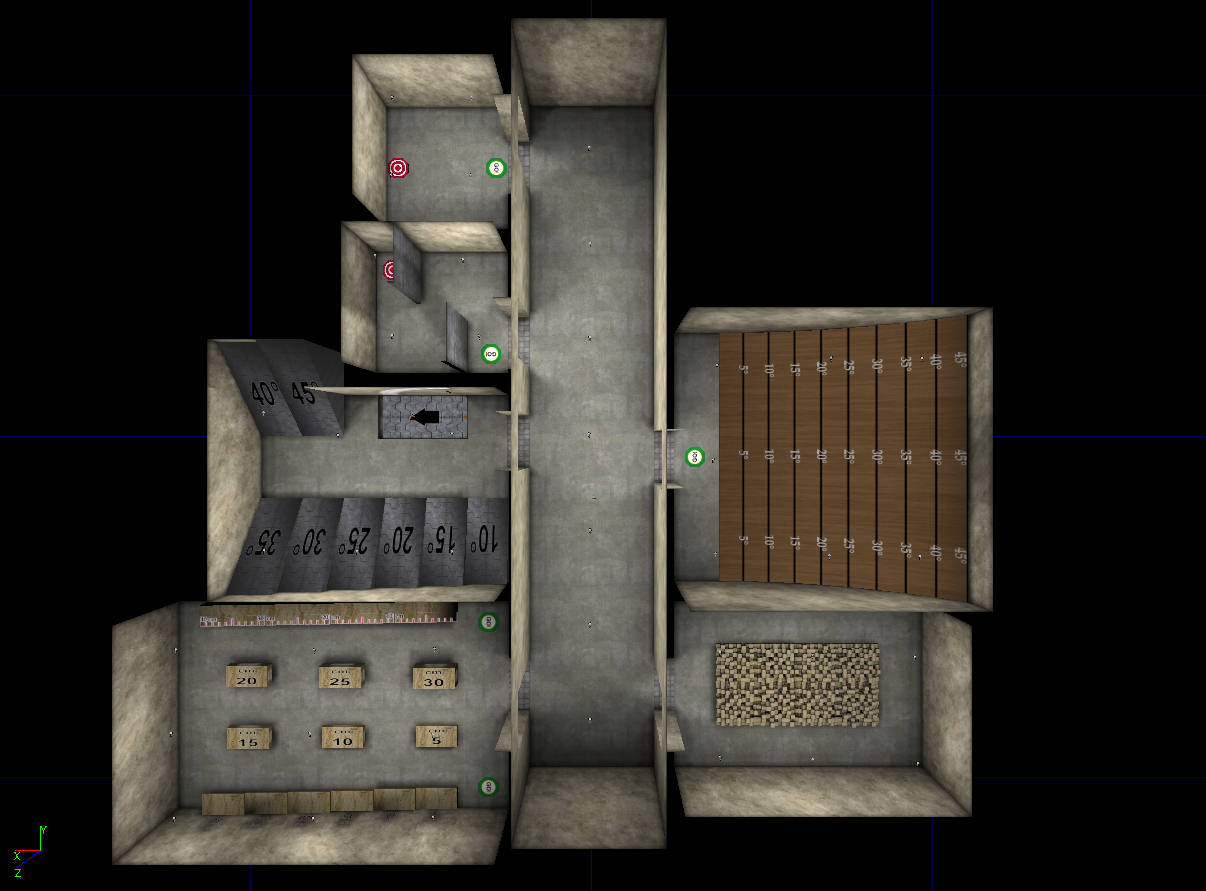
This map was designed to allow simple physics tests with robots and is based on the " Robot Validation for wheeled robots" proposal by Mike Lewis.
Download: ![]() DM-ValidationTest-250.zip
DM-ValidationTest-250.zip
The map was designed to use zones optimization. See these small movies to see optimization in action:
![]() ZoneOptimization1.avi (watching other rooms from room D)
ZoneOptimization1.avi (watching other rooms from room D)
![]() ZoneOptimization2.avi (sliding from room F to D)
ZoneOptimization2.avi (sliding from room F to D)
The map also includes all the used textures, static meshes and scripts. Starting points are indicated over each door :-)
 |
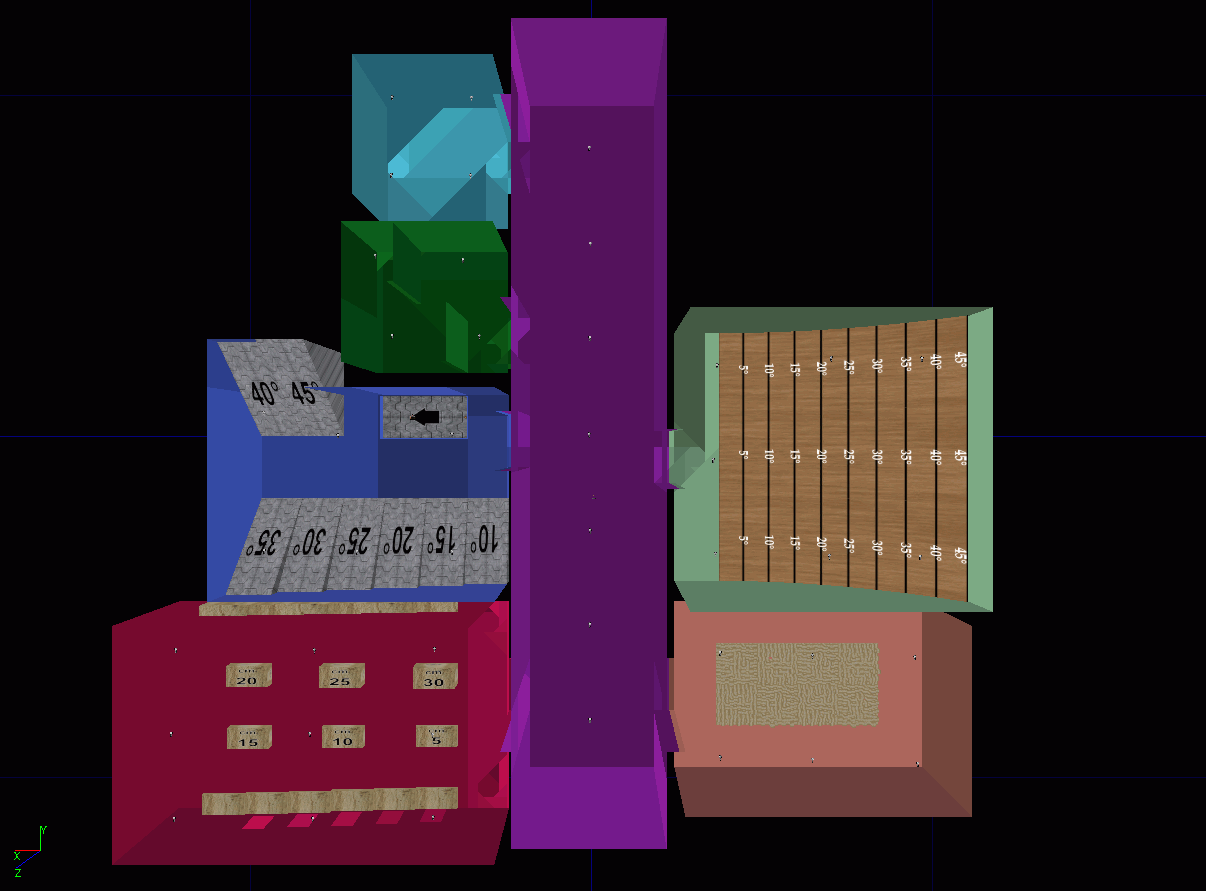 |
Rooms A and B can be used for quick drive tests.
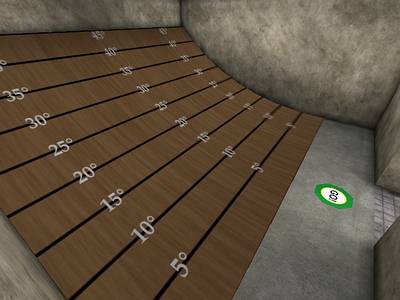
Room C and D have several ramps that can be used to test friction, climbing and rollover:
 |
 |
There's also a scripted ramp (in room C), see these videos:
![]() ScriptedRamp1.mpg
ScriptedRamp1.mpg
![]() ScriptedRamp2.mpg
ScriptedRamp2.mpg
This ramp works in client only mode but has some problem in client-server. If you want to use it you have to start the map in a client with a command like this:
ut2004 DM-ValidationTest-250?game=USARBot.USARDeathMatch?spectatoronly=1?TimeLimit=0?quickstart=true -ini=usarsim.ini
This is a video of the skate ramp (room D):
![]() SkateRamp.mpg
SkateRamp.mpg
Room E is filled with various obstacles and another long ramp to make more tests on rollover. Room F have a large, but not too tall, step filed.
![]() StepField.avi
StepField.avi
 |
 |
This map is only a proposal, a starting point to build more complex and standardized arenas for testing virtual robots.
![]()
![]()