|
|
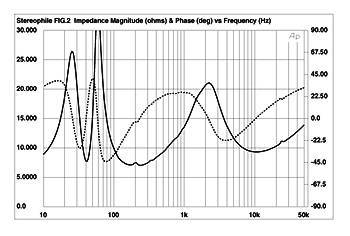
1.01 Amplificatori in classe D: introduzione.L’amplificatore di potenza è lo stadio di un amplificatore che fornisce la potenza al carico. Diversi sono i parametri che ne misurano le prestazioni: la resistenza di uscita, la distorsione armonica totale (THD) e il rendimento di potenza (h). La resistenza di uscita deve essere piccola rispetto al carico in modo da rendere il guadagno dello stadio di potenza indipendente da esso: in particolare quando il carico è una cassa acustica la sua impedenza può variare di molto con la frequenza (si veda figura 1), così se l’amplificatore presenta un guadagno dipendente da un simile carico il segnale emesso dalla cassa acustica potrebbe risultare colorato.
Figura 1 La distorsione armonica totale (THD) è una misura della linearità: un amplificatore con in ingresso un segnale sinusoidale di pulsazione w, a causa della sua non linearità, genera sul carico, oltre all’armonica fondamentale di pulsazione w, anche le armoniche di ordine superiore di pulsazioni 2w, 3w, 4w…. La corrente sul carico può essere sviluppata in serie di Fourier : iL
= B0 + B1 coswt
+ B2 cos2wt
+ B3 cos3wt
+… + Bn
cosnwt
+.. Dove B0, B1, B2,…,Bn,.. sono le ampiezze delle armoniche. I rapporti: D2
=
sono chiamati distorsioni di 2a, 3a,… n-esima armonica. La distorsione armonica totale è definita: THD =
Questa rappresenta il rapporto tra la potenza delle armoniche di ordine superiore o uguale al secondo e la potenza della fondamentale. Amplificatori audio di potenza ad alta fedeltà presentano un THD minore dell’1%. Il rendimento di potenza h è il rapporto tra la potenza fornita al carico e la potenza assorbita dall’alimentatore. Si può dimostrare con semplici considerazioni che amplificatori in classe A hanno un rendimento massimo teorico del 25%, mentre amplificatori in classe B (più largamente utilizzati) hanno un rendimento massimo del 78.5%. I rendimenti reali di amplificatori audio ad alta fedeltà sono dell’ordine di 15-20%. Gli amplificatori in classe D si differenziano dagli amplificatori in classe A, B e AB per un rendimento di potenza reale che può essere superiore al 95%. Tale caratteristica crea numerosi vantaggi: § Il risparmio energetico ( specialmente quando le potenze in gioco sono elevate). § Il minore calore da smaltire sugli elementi attivi riduce le dimensioni dei dissipatori termici limitando così l’ingombro dell’amplificatore e i costi di realizzazione. § La limitata potenza richiesta all’alimentatore fa aumentare la durata temporale della batteria sugli apparecchi portatili mentre riduce i costi dell’alimentatore negli apparecchi non portatili. I problemi che in generale interessano gli amplificatori in classe D sono legati alla distorsione armonica elevata e alla resistenza di uscita pure elevata: amplificatori in classe D migliorano il parametro rendimento, ma peggiorano gli altri parametri. Oggetto di ricerca è come migliorare le prestazioni di questi amplificatori quindi come ridurre la resistenza di uscita, come ridurre la distorsione e come ottenere una banda passante piatta. Con questo lavoro si vuole studiare il funzionamento di questa nuova classe di amplificatori, mettendo in luce la problematiche ad essi legate. Saranno proposti degli schemi suggeriti dagli articoli che abbiamo trovato in letteratura e sarà realizzato un amplificatore audio in classe D che fa uso di un controllo integrato LX1720 della LinFinity. Infine su questo prototipo misureremo le prestazioni valutando i parametri precedentemente introdotti. 1.02 Funzionamento di amplificatori in classe DNegli amplificatori in classe D gli elementi attivi che forniscono potenza al carico non lavorano nella loro regione attiva, ma funzionano in commutazione, cioè si comportano come interruttori (switching). Un modulatore PWM genera un’onda quadra a frequenza molto elevata con duty-cicle (t) proporzionale all’ampiezza istantanea del segnale in ingresso. Il segnale così modulato pilota gli switching in modo che alla loro uscita si riproduca la stessa onda quadra modulata, ma a potenza superiore. Il valore medio del segnale modulato sarà proporzionale al segnale di ingresso, dunque con un semplice filtro passa basso si ricostruisce sul carico il segnale di ingresso (figura 2).
Figura 2 E’ facile vedere in questo schema una forte analogia con gli alimentatori switching, infatti se la tensione Vi(t) fosse costante e pari ad una tensione di riferimento, lo schema di figura 2 sarebbe un alimentatore switching. In figura 3 riportiamo uno schema di amplificatore in classe D che fa uso della retroazione.
Figura 3 Il modulatore PWM è composto da un amplificatore differenziale e un comparatore: l’amplificatore differenziale amplifica la differenza tra il segnale retroazionato e il segnale in ingresso generando il segnale errore( e(t) = Vout(t) – Vin(t) ), questo viene comparato con un’onda a dente di sega a frequenza fs generando in questo modo il segnale modulato PWM (si veda la figura 4).
Figura 4 Il duty-cicle dell’onda modulata è proporzionale al segnale errore cambiato di segno, così il valore medio del segnale modulato è proporzionale al l’errore con segno invertito. I due MOSFET, connessi in una configurazione chiamata half-bredge, amplificano il segnale al loro ingresso. Il filtro passa basso estrae il valor medio del segnale modulato, vale a dire il segnale errore con segno invertito. Se Vi(t)>Vout(t) l’errore è negativo, e(t)<0, il duty-cicle dell’onda modulata è superiore al 50% (valor medio positivo) il segnale sul carico cresce; se invece Vi(t)<Vout(t) l’errore è positivo e il duty-cicle del segnale PWM è inferiore al 50% (valor medio negativo) e Vout(t) scende. L’uscita Vout(t) segue l’andamento dell’ingresso Vi(t) come in un inseguitore. Il partitore resistivo sul ramo di retroazione serve ad attenuare l’uscita Vout(t) per riportarla allo stesso livello dell’ingresso Vi(t), mentre il filtro passa basso ne riduce ogni residuo di ripple in altra frequenza. La frequenza dell’oscillatore fs deve essere molto più grande della massima frequenza del segnale di ingresso: per applicazioni in campo audio, dove lo spettro del segnale Vi(t) arriva fino a 20 kHz, fs va scelta tra i 300-500 kHz. Simili frequenze impongono di utilizzare come dispositivi attivi transistori MOS; infatti i bipolari possono essere impiegati fino a frequenze dell’ordine di 20kHz a causa dei tempi di commutazione elevati, ma soprattutto a causa del tempo di immagazzinamento , tipico dei Bjt. Tuttavia frequenze così elevate pongono problemi di compatibilità elettromagnetica; in particolare va posta attenzione al circuito convertitore, infatti sui drain dei MOSFET scorrono grosse correnti con componenti armoniche a frequenza molto superiore a fs. Tali circuiti saranno sorgenti di onde elettromagnetiche irradiate che, oltre a creare danno alla salute umana, possono interferire con circuiti esterni, oppure creare malfunzionamenti in altre parti dell’amplificatore. Si dovrà porre particolare attenzione al layout del circuiti convertitore cercando di ridurne la lunghezza delle piste o al limite introducendo delle ferriti. Le attuali tecnologie consentono di integrare all’interno del controllo anche i MOS del convertitore; questa considerazione può risultare banale se non si mette in evidenza che i MOS di potenza superiore al Watt sono realizzati in tecnologie DMOS o HEXFET (parleremo più avanti di queste sigle) e che quindi sono profondamente diversi dai MOS di segnale usati per il controllo. Ad esempio SGS-THOMSON realizza l’amplificatore TDA7481 in classe D con controllo e convertitore integrati sullo stesso chip: questo genera una potenza sul carico di 18 Watts, con un THD del 10% (questo valore è troppo elevato per applicazioni in alta fedeltà). L’integrazione del convertitore oltre a ridurre l’ingombro dell’amplificatore elimina anche i problemi di compatibilità elettromagnetica ad essi legato. Il filtro di uscita è un componente abbastanza critico, infatti questo deve essere di ordine elevato per attenuare il ripple alla frequenza di commutazione, ma questa esigenza ne impedisce l’integrazione all’interno del controllo. L’ordine del filtro può essere ridotto utilizzando il convertitore chiamato Cuk converter che genera un basso ripple sul carico, ma presenta una caratteristica fortemente non lineare (si consulti la bibliografia [1] e [2] per i riferimenti al Cuk converter). Un approccio alternativo è quello proposto da Ronan e Tuijl [3] che riducono il riple sul carico combinando un amplificatore in classe AB con un amplificatore switching. 1.03 Convertitore half-bridgeIl convertitore è quella parte dell’amplificatore che tratta segnali a più elevata potenza: sarà esso responsabile del rendimento dell’amplificatore. La potenza dissipata sui MOSFET, visti come interruttori ideali, è nulla: si realizza in questo modo il rendimento teorico del 100%. La potenza dissipata dai MOS reali può essere vista come contributo di due termini: PD = Pc + Pon dove PD è il totale della potenza dissipata da uno dei MOS, Pc è la potenza dissipata durante il transitorio di commutazione e Pon è la potenza dissipata durante i periodi di accensione e di spegnimento del MOS. Trascuriamo le correnti di perdita durante il tempo in cui il dispositivo è spento. In figura 5 sono riportate le forme d’onda delle tensioni durante un ciclo di commutazione del convertitore half-bridge, trascurando il filtro LPF di uscita. È importante far notare che le tensioni che pilotano i gate debbono essere tali da non accendere mai contemporaneamente i due MOS altrimenti viene messa in cortocircuito l’alimentazione.
Figura 5 Con semplici ragionamenti (figura 5) si può stimare il termine di potenza dissipata Pon dai transistori Qp Qn:
Dove Ronp e Ronn sono le resistenze di canale dei MOSFET quando sono in conduzione. Per ridurre tale contributo di potenza è necessario scegliere dei MOS con valori piccoli di Ron. La potenza di commutazione non può essere stimata a priori, infatti questa dipende dalla pendenza dei fronti di tensione che pilotano i gate, dalle capacità parassite dei MOS e da eventuali effetti induttivi presenti sul carico. La potenza media dissipata su entrambi i MOS può essere scritta:
Vale Ponp » Ponn , in quanto Ronp » Ronp (sono dello stesso ordine di grandezza)
I termini tra parentesi rappresentano l’area dei picchi di potenza di commutazione visti nella precedente figura 5. Dalla precedente formula è importante far notare che aumentando la frequenza dell’oscillatore aumenta la potenza persa nei MOS, dunque diminuisce il rendimento dell’amplificatore. La massima tensione a cui i MOS sono sottoposti è pari a
circa 2VDD, mentre la massima corrente continua è
IM =
VM
=
Prms
=
Sia ad esempio VDD = 15V, R = 4W, Ron = 0.5W, allora la potenza massima sul carico è Prms = 22W. Alcune considerazioni sul convertitore half-bridge: la funzione di trasferimento da esso realizzata è abbastanza lineare, ma il ripple sul carico è alto, tanto da richiedere un filtro almeno del quarto ordine, il quale è difficile da realizzare integrato insieme all’amplificatore. L’utilizzo di MOS a canale P (più resistivo dell’N a causa della minore mobilità delle lacune) riduce il rendimento dell’amplificatore. I circuiti di pilotaggio dei MOS non sono riferiti a massa, bensì alle tensioni di alimentazione e questo complica la progettazione dei driver. La corrente assorbita dall’alimentazione ha andamento impulsivo e richiede che siano presi provvedimenti per evitare che le piste di alimentazione diventino sedi di onde elettromagnetiche irradiate; sono necessari condensatori di livellamento a passe perdite e di grandi capacità posti in vicinanza dei MOS, esempio condensatori al tantalio (sono molto costosi!). 1.04 Convertitore full- bridgeIl convertitore full-bridge è rappresentato in figura 6; può essere visto come due convertitori half-bridge.
Figura 6 Quando Qp1 e Qn1 sono accesi (Qn2 e Qp2 spenti) si genera un impulso di corrente positiva sul carico; quando Qp2 e Qn2 sono accesi (Qp1 e Qn1 spenti) si genera sul carico un impulso negativo di corrente. Come nell’half-bridge diamo una descrizione sommaria delle potenze in gioco. La potenza dissipata da ciascun MOS è il contributo di due termini: una potenza di commutazione Pc e una potenza di conduzione Pon : PD = Pc + Pon. In figura 7 è riportato un calcolo della potenza di conduzione:
Figura 7 La potenza dissipata per conduzione su ciascuno dei quattro MOS vale: Ponp1
= Ponp2 =
La potenza media totale
= Ponp1 + Ponn1
=
E’ doveroso un confronto con la potenza di conduzione
media calcolata nell’half-bridge (
1.05 I MOSFET di potenzaLa struttura classica dei MOS per piccoli segnali non è adatta per MOSFET di potenza in quanto la corrente di drain, nella regione di saturazione, è legata alla VGS dalla relazione:
Per aumentare iD è necessario aumentare W/L, cioè costruire MOS a canale corto: questo riduce enormemente la tensione VDS di breakdown a causa della regione svuotata prodotta dalla giunzione substrato-drain (polarizzata in inversa) che và ad estendersi sotto il canale. Una strutture a canale corto che risolve questo problema è l’HEXFET o DMOS (la sigla DMOS sta per MOS a doppia diffusione), studiato dalla International Rectifier, riportata in figura 8:
Figura 8 HEXFET In questa struttura si è risolto il problema della tensione di breakdown realizzando il substrato (N) molto meno drogato del body (P), così che la regione svuotata della giunzione drain-body si estende principalmente nel substrato piuttosto che nel canale. La struttura HEXFET ha almeno due pregi rispetto alla struttura MOS classica. Il drain non è sul lato del gate-source e questo consente di realizzare un ottimo contatto termico. Inoltre la struttura esagonale della cella elementare consente di integrare fino a 800 cella per mm2, consentendo in uno stesso chip di disporre un gran numero di MOS in parallelo. Le caratteristiche elettriche degli HEXFET hanno delle differenze rispetto a quelle dei MOS tradizionali: i MOS di potenza presentano una tensione di soglia dell’ordine di 2-4V e manifestano un fenomeno detto della saturazione delle velocità: l’elevato campo elettrico lungo il canale corto fa sì che la velocità dei portatori raggiunga il limite superiore Usat (5 106 cm/s). Questo si ripercuote sulla caratteristica iD VGS rendendo questa lineare, almeno per valori elevati di VGS.
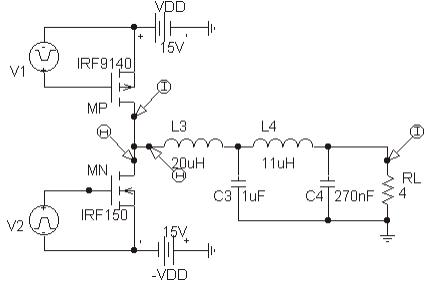
Inoltre iD non dipende più dalla lunghezza di canale, ma solo dalla larghezza. Anche nell’HEXFET come nel MOS è presente in diodo parassita connesso tra source e drain prodotto dalla giunzione body-drain. In applicazioni di potenza tale diodo potrebbe essere utilizzato come elemento attivo del circuito, quindi nei manuali ne sono riportati anche i suoi tempi di commutazione. Spesso il diodo parassita è sfruttato nella regione di breakdown, come zener, per evitare che la VDS non superi un valore limite. 1.06 Simulazioni SPICE dell’half-bridge e del full-bridgeSvolgeremo due semplici simulazioni dei due circuiti sopra descritti con lo scopo di stimare la potenza di commutazione dissipata nei MOS. I modelli dei dispositivi ai quali facciamo riferimento sono quelli forniti dallo Spice e vanno sotto il nome di IRF150 (N MOS) e IRF9140 (P MOS). Tuttavia questi non sono affidabili in quanto si rifanno ai modelli dei MOS classici e non tengono conto delle considerazioni che abbiamo fatto nel precedente paragrafo. Modelli più accurato degli HEXFET sono forniti dalla International Rectifier (la ditta che li produce): essi consistono in “subcircuit” simulabili attraverso il programma SPICE, ma essendo questi molto complessi non funzionano con la versione evaluation dello SPICE. Per questo motivo ci accontenteremo di simulare i circuiti con i modelli sopra citati. In figura 9 riportiamo lo schematico per la simulazione dell’half-bridge:
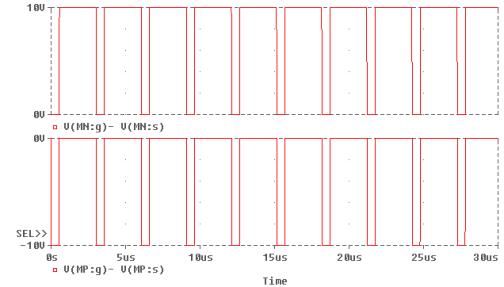
Figura 9 V1 e V2 generano le tensioni, riferite a massa, riportate in figura 10. Anche se in figura non è evidenziato, le tensioni che pilotano i gate sono tali da non portare contemporaneamente in conduzione i MOS.
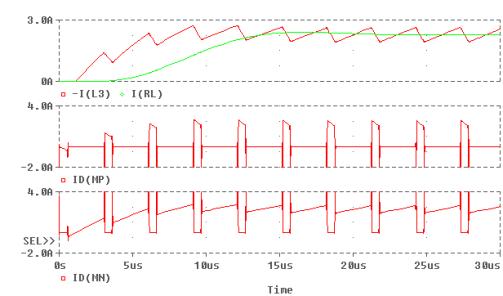
Figura 10 In figura 11 riportiamo le correnti sui drain dei MOS, la corrente all’ingresso del filtro e la corrente sul carico. Notiamo una differenza rispetto alle forme d’onda che avevamo previsto nelle pagine precedenti, infatti la corrente di drain dei MOS non è costante durante il tempo in cui si ha conduzione, ma cresce o decresce linearmente. Questo è dovuto alla presenza del filtro, in particolare alle induttanze L3 e L4. I picchi di corrente durante le commutazioni dei MOS raggiungono livelli di 40 A, ma tale dato non è attendibile a causa del modello troppo approssimato. In figura 12 sono riportate le potenze istantanee dissipate dai MOS.
Figura 11
Figura 12 In figura 13 riportiamo gli stessi grafici di figura 12 con diversa scala in modo da poter apprezzare l’ampiezza dei picchi di potenza di commutazione.
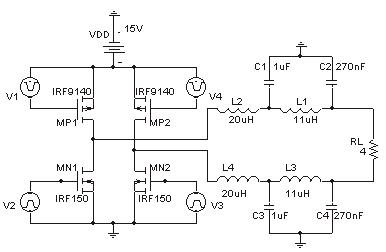
Figura 13 Anche se i picchi di potenza raggiungono livelli dell’ordine dei 600Watts, abbiamo stimato, attraverso l’operazione di FFT, che la potenza media dissipata sui MOS è 2.5Watt per il MOS P e di 7Watt per il MOS N, quando sul carico la potenza è di circa 20Watts, con un rendimento stimato del 68% (20/29.5). Nota, questi numeri non sono affidabili a causa dei modelli dei MOS troppo approssimati, però danno una idea del funzionamento del circuito. Anche per il convertitore full-bridge presentiamo delle simulazioni simili alle precedenti: in figura 14 è rappresentato lo schema che è stato simulato.
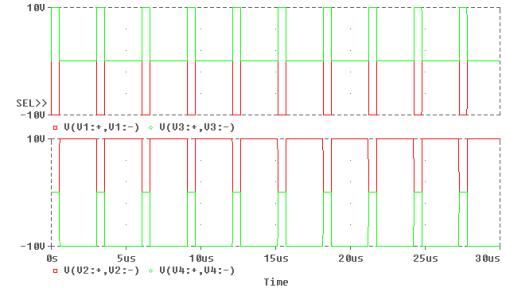
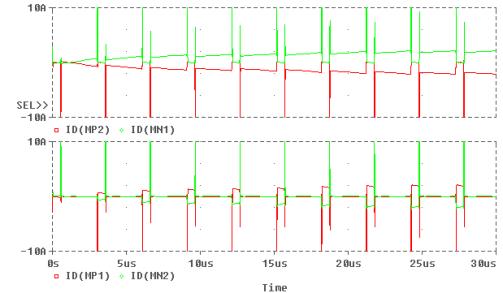
Figura 14 In figura 15 sono riportate le tensioni di pilotaggio dei MOS, mentre in figura 16 sono rappresentate le correnti di drain di ciascun MOS. Va fatto notare che i picchi di corrente durante le commutazioni raggiungono i 40 A.
Figura 15
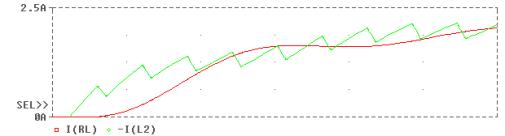
Figura 16 In figura 17 è rappresentata la corrente sul carico e la corrente sull’induttanza L2. Va fatto notare che il circuito impiega circa 30 ms per produrre un livello di corrente costante sul carico.
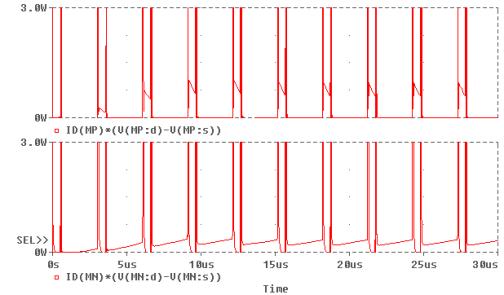
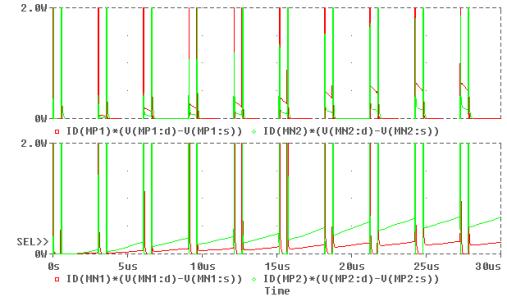
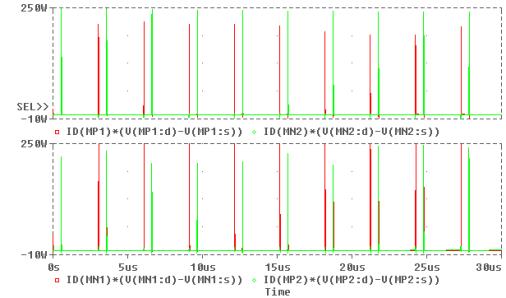
Figura 17 Nelle successive figure rappresentiamo la potenza dissipata dai MOS: in figura 18 è possibile vedere la potenza dissipata durante la conduzione dei MOS che è dell’ordine di 0.1 , 0.3 Watts. In figura 18 abbiamo gli stessi grafici con una scala più espansa per mettere in risalto che durante il transitorio di commutazione si dissipano potenze fino a 250 Watts. Nonostante ciò la potenza media dissipata sui MOS risulta abbastanza contenuta: abbiamo stimato, attraverso l’operazione di FFT, che la potenza media dissipata su ogni MOS è rispettivamente: MP1 750 mWatts, MP2 1.2 Watts, MN1 2 Watts e MN2 1.6 Watts, quando sul carico la potenza è di circa 16Watts (2A2 ´ 4W = 16Watts), con un rendimento stimato del 74% (16/(0.75+1.2+2+1.6+16)). Ovviamente anche questi numeri vanno considerati come stime a causa della forte approssimazione sui modelli dei MOS.
Figura 18
Figura 19 |