

Elettronica di SED U-01
Per munire di Elettronica il robot SED U-01 mi sono affidato ad una attenta ricerca su internet fra i tanti siti di Elettronica per Robot, scoprendo un sito molto fornito con semplici e chiare spiegazioni su prodotti che facevano al caso mio. Ovviamente sono capace di sbrogliare schemi elettrici, realizzare circuiti stampati, assemblare componenti e far funzionare il tutto ma per mancanza di conoscenze adeguate non sono in grado di progettare elettronica ne di programmarla, perchè? per ovvi motivi di studio, ciò che riesco a realizzare spesso con tanta fatica e frutto di intuizione, ingegno e molta manualità.
Il sito in questione e : http://www.adrirobot.it/ dove sono riportati tanti progetti sia reperibili in edicola che da costruirsi, ed e proprio qui che ho trovato una scheda multi servo in grado di pilotare 8 servo da PC utilizzando un semplice programma fatto di cursori che agiscono sui servo variandone la posizione.
La scheda Multi servo con tutta la documentazione circuito stampato, I componenti e programma di gestione la potete trovare qui:
http://www.adrirobot.it/menu_new/index/index_multiservo.htm
Ovviamente ringrazio Adriano Gandolfo ideatore del sito ADRIROBOT da dove ho preso e realizzato l'Elettronica di SED U-01
---------------------------------
Prima di passare all'Elettronica c'è un breve passaggio dove spiego come ho realizzato il supporto in plexiglas posto nella testa del Robot sul quale verrà montata la scheda che governa da PC i servo di SED.
----------------------------
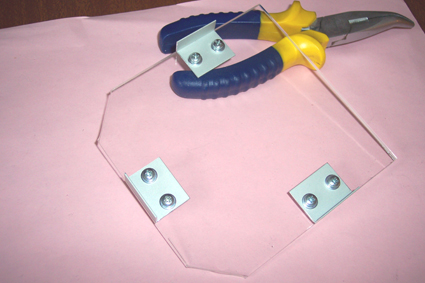
Dalle foto si può vedere che da un pezzo di Plexiglas da 3mm comperato in ferramenta ho tagliato una parte delle misure che mi servivano secondo lo spazio che avevo nella testa di SED. Il pezzo e stato tagliato con l'apposito cutter con la lama uncinata che serve proprio al taglio di questi materiali.
Ricavato il pezzo l'ho squadrato e perforato applicandoci 3 staffe ad L 20x10 mm per una lunghezza di 25mm poste in modo che combaciassero con la precedente foratura praticata per fissare altri supporti della testa ( come si evince dagli altri articoli ).

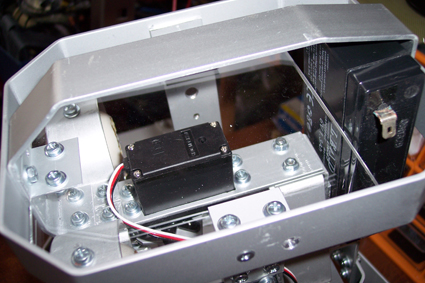
Per finire il tutto e posto nella testa utilizzando l'apposito spazio lasciato in fase di progettazione a disposizione delle schede elettroniche per il controllo del Robot.
-------------------------------
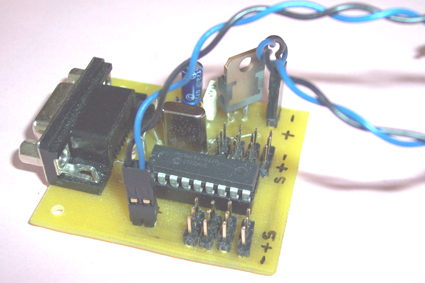
Ora passiamo alla scheda che funge da interfaccia per controllare il movimento dei servo.
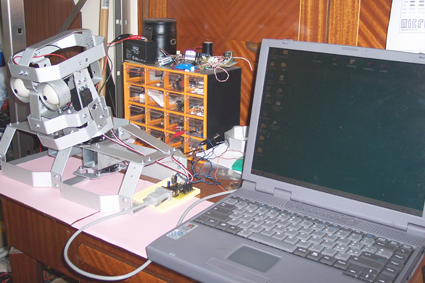
Nelle foto che seguono si può vedere la scheda realizzata e collegata al Robot tramite un cavo seriale ed il PC dove e stato caricato il programma da dove muovo i servo.


------------------------------------------
Collaudo della meccanica:
VIDEO, DEL ROBOT SED U-01 CHE COMPIE DEI MOVIMENTI, ALLO SCOPO DI VERIFICARE IL FUNZIONAMENTO DELLA MECCANICA.
VIDEO 1 VIDEO 2 VIDEO 3 VIDEO 4 VIDEO 5 VIDEO 6
