In un sistema automatizzato di riempimento e pesatura vengono impiegati due trasduttori, il primo è ad ultrasuoni ed è impiegato per rilevare la posizione di un recipiente in cui dev'essere versata una prefissata quantità di materiale, il secondo è una cella di carico che ha il compito di pesare il contenitore con una quantità predefinita di materiale. Il trasduttore di posizione ha un uscita in corrente di 4 - 10 mA, alla distanza minima di 60mm eroga 4mA ed alla massima di 500mm ne eroga 10. Il trasduttore di forza e di tipo a ponte resistivo e possiede un'uscita di tipo differenziale. Alimentando il ponte con una tensione di 10V ed applicando una forza massima di 30N si ottiene una tensione differenziale di 0.36V. Occorre valutare la posizione del recipiente con un errore massimo di 5mm e misurare la forza peso con un errore massimo di 0.05N. I segnali provenienti dai due trasduttori devono essere condizionati e convertiti in segnali numerici da inviare all'elaboratore che gestisce l'impianto.
Schema blocchi del sistema d'acquisizione con descrizione dettagliata delle parti;
Dimensionamento dei circuiti di condizionamento dei segnali provenienti dai due trasduttori;
Scelta della frequenza di campionamento;
Risoluzione e scelta del convertitore A/D;
Strumentazione per il collaudo dei circuiti di condizionamento.
/--------------------------------------/
1.
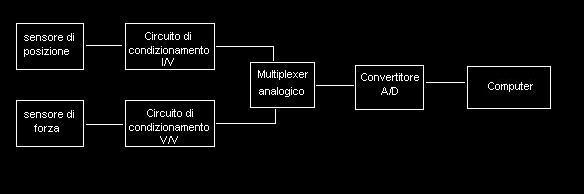
Schema blocchi del sistema d'acquisizione
I due blocchi di condizionamento, convertono i segnali provenienti dai trasduttori in tensioni variabili da 0V a 5V. Il multiplatore legge tali segnali e li invia, in sequenza, al blocco convertitore, questo a sua volta digitalizza i dati e li trasmette in forma seriale al computer, che infine li elabora in modo da controllare il sistema.
2.
Circuiti di condizionamento
I segnali provenienti dai due trasduttori, non essendo idonei per l'ingresso del convertitore A/D, sono elaborati da due circuiti che forniscono ognuno, una tensione variabile da 0 a 5V. Il multiplatore poi li rende disponibili sulla propria uscita, alternativamente.
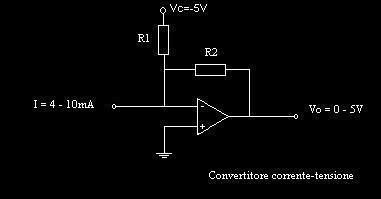
Il primo dei due è un convertitore I/V, per il segnale uscente dal sensore ad ultrasuoni:
L'uscita dipende dalla seguente relazione: Vo/R2=(Vc/R1)+I ==> Vo=R2((Vc/R1)+I) ==> Vo=-5R2/R1+I, da questa si deduce che l'uscita è linearmente dipendente dall'ingresso ed impostando le condizioni iniziali e finali, si ha:
I=4mA, Vo=0V (condiz. iniziale) ==> 0=-5R2/R1+0.004 ==> R1=1250W
I=10mA, Vo=5V (condiz. finale) ==> 5=-5R2/R1+0.01 ==> R2=833W
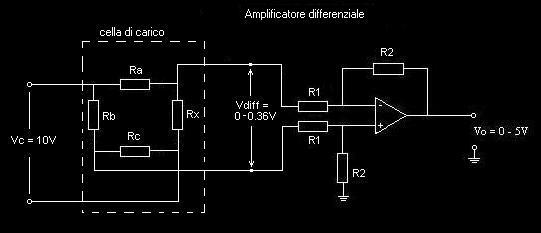
Il secondo circuito è un amplificatore differenziale che converte il segnale del trasduttore di forza in una tensione variabile da 0 a 5V:
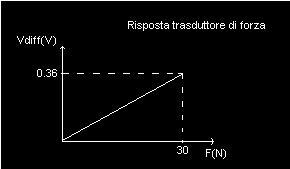
Il trasduttore di forza è un ponte resistivo e fornisce quindi, un'uscita linearmente proporzionale alla forza applicata:
Premesso che Vo=(R2/R1)Vdiff e considerando le condizioni iniziali e finali:
Vdiff=0 Vo=0V (iniziali)
Vdiff=0.36 Vo=5V (finali)
si ha: 5=(R2/R1)*0.36 ==> R2=13.9*R1, perciò: posto R2=100KW ==>
R1=7.2KW
3.
Frequenza di campionamento
Al punto precedente si è constatato che la risposta in corrente del trasduttore di posizione è lineare, quindi per apprezzare un errore di 5mm su un'escursione di 440mm, è necessaria una risoluzione ML1=(Dmax-Dmin)/5=440/5=88 livelli di quantizzazione, con Dmax e Dmin rispettivamente, la distanza massima e minima del recipiente.
Il numero di bit necessari per quantificare i livelli è: NL1=log2ML1 = 6.46bit, arrotontando per eccesso: NL1 = 7bit.
Per l'altro trasduttore, l'errore da apprezzare è di 0.05N su un'escursione di 30N, quindi la risoluzione è: ML2=(Fmax-Fmin)/0.05=30/0.05=600 livelli di quantizzazione ed il numero di bit necessari è: NL2 = log2600 = 9.2bit, arrotondando: NL2 = 10bit.
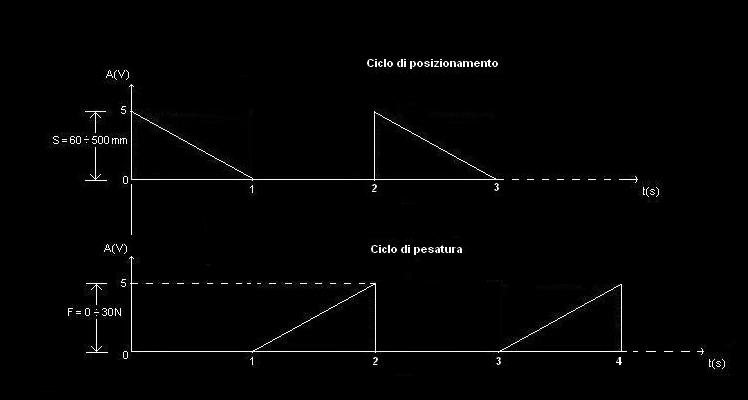
Per ipotesi il ciclo meccanico dura 2 secondi, uno per il posizionamento a 60mm ed uno per una pesatura di 30 Newton, così come mostrato nella seguente figura:
Il campionamento avviene in modo che si possano avere letture abbastanza veloci da consentire un controllo nei margini d'errore.
In pratica si possono fare almeno 88 letture di livello durante il posizionamento, dal quale si deduce che la frequenza di campionamento è pari ad almeno: fc1=ML1 = 88Hz ( 88 campioni al secondo). Si possono effettuare invece, almeno 600 letture di livello durante la pesatura, dal quale si ricava che la frequenza di campionamento è pari ad almeno: fc2= ML2 = 600Hz ( 600 campioni al secondo). Per semplicità si adotta la frequenza di campionamento maggiore per entrambi i segnali.
4.
Risoluzione e scelta del convertitore
La risoluzione, considerando il numero di livelli ML2 scelti al punto precedente, è: N2 = log2 ML2 = 10bit.
Il convertitore A/D ha:
- un ingresso che accetta segnali da 0V a 5V;
- un uscita parallela;
- il tempo di conversione almeno uguale a fc2;
- una risoluzione di 10bit.
5.
Strumentazione di collaudo
Considerando il ciclo macchina, è necessaria un'analisi nel tempo, per cui gli strumenti idonei a collaudare i circuiti di condizionamento dei due trasduttori sono:
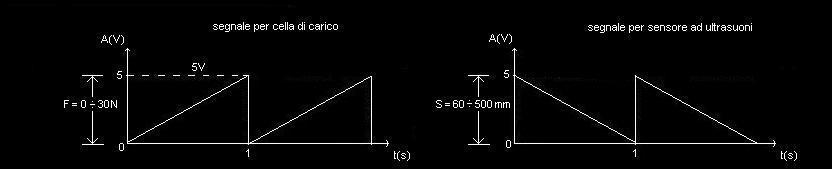
- Generatore di segnali per simulare il posizionamento e la pesatura, ovvero forme d'onda a dente di sega con periodo T = 1s;
- Alimentatore cc per il funzionamento dei suddetti circuiti;
- Oscilloscopio per la lettura sia dei segnali analogici che digitali.