|
|
|
|
|
|
|
|
E’
sicuramente l’oggetto elettronico e meccanico completamente ideato e
realizzato che mi ha impegnato per più tempo. |
|
|
|
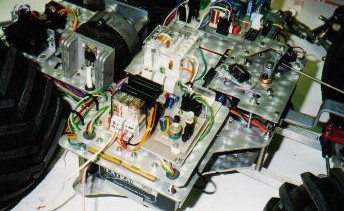
Realizzato
prevalentemente da alluminio lavorato e plastica di vario genere. Qualsiasi componente installato sopra, dall’elettronica alla meccanica e totalmente costruito a mano o derivante da parte di oggetti comuni (ritagli di alluminio lavorati, particolari in ferro adeguati alla propria funzione ed ingombro, parti in plastica ricavati da oggetti comuni commerciali, adattati lavorati e verniciati). Tutte la parte elettronica istallata a bordo e stata progettate e realizzata da me mediante l’impiego di circuiti stampati realizzati con il classico sistema di incisione manuale a pennarelli (Decon –dalo 33) e trasferibili R41. |
|
Considerato
che alcuni circuiti o parti meccaniche le ho realizzate più volte da capo per
renderle ottimali alla propria funzione è facile capire che il robottino mi ha
impegnato per molto tempo; a volte ho pensato di abbandonare tutto ma alla fine
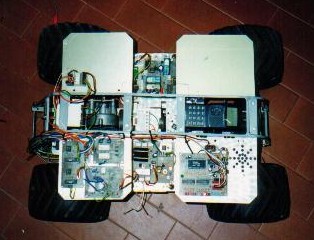
Meal_00 è funzionante con tutte le caratteristiche pensate. Costituito
da 4 ruote in gomma (da modellismo 66/43X25 ) imbottite di gomma per resistere
al peso di tutti i meccanismi installati a bordo. Radiocomandato
da ricetrasmittente tipo VHF con
decodifica di segnali DTMF. |
|
|
|
Si
muove ad una velocità variabile di circa 0 -3 Km orari (a passo d’uomo) e un
autonomia di circa un’ora. La parte superiore (ruotante a 360 ° ) è costituita da una telecamera B/N che trasmette l’immagine (della strada che il robot percorre ) in un canale televisivo. Allo
stesso tempo posso parlare in circostanze del robot (tramite la ricetrasmittente
VHF) perché è munito di piccolo altoparlante ed ascoltare i rumori o voci che
sono in sua prossimità , perché a bordo c’è un microfono preamplificato |
|
Inoltre ci sono le luci notturne, luce stroboscopica in alto per la localizzazione e una sirena ad alta sonorizzazione (tipo allarmi autovetture) da usare ad esempio per spaventare qualche gatto incuriosito. |
|
|
|
|
| Fase di costruzione | |
|
L’alimentazione viene fornita tramite 6 batterie a secco (12V 1,2A ciascuna ), sono pese ma il motore montato le trasporta tranquillamente. Le
batterie sono collegate ad una scheda di protezione e monitoraggio (quando la
batteria è in esaurimento è visibile da un led flah installato sopra ). Un
classico L7805 l’ho usato per alimentare alcune schede a bordo di Meal_00 che
richiedono tensione minore. Quando
Meal_00 riposa è parcheggiato nel suo box dove viene ricaricato costantemente
le batterie per mezzo di contatti a tasteggio (sono quelli usati negli sportelli
posteriori delle auto). |
|
|
|
|
| Radiocomando | |
|
I
comandi a Meal_00 vengono inviati da
un normale apparato ricetrasmittente tipo VHF e ricevuti da uno stesso con
decodifica DTMF . La
ricetrasmittente che si trova a bordo è interfacciata ad una scheda composta
essenzialmente da integrati tipo MC145436 – CD4514 idonei a decodificare
il tasto premuto ed abilitare l’utenza desiderata. Girare
lo sterzo - Velocità di avanzamento – Direzione puntamento telecamera ecc.. La distanza che si può raggiungere per pilotarlo è intorno ai 10 Km. Inoltre tramite l'apparato RTX installato sopra si possono ascoltare segnali vocali in prossimità della posizione del Robot inviati dall'RTX di comando. |
|
|
Cioè la mia voce trasmessa per mezzo del radiocomando si sente in prossimità del robottino... esempio: Esci da lì perche devo passare!! Oppure attendo in silenzio e quando qualcuno ne parla male gli rispondo. |
|
|
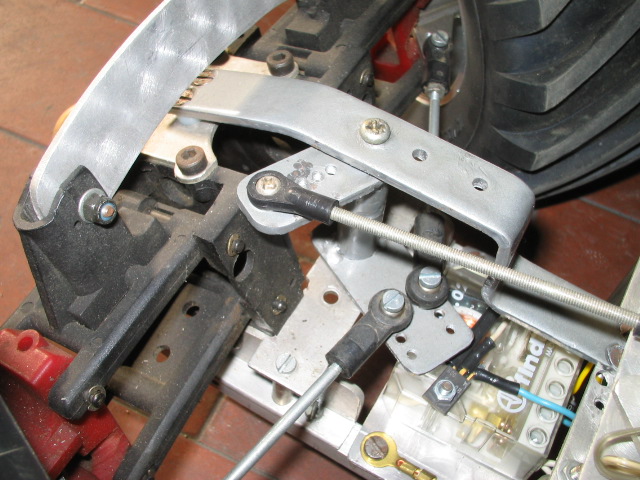
Sterzo e Motore |
|
|
La parte meccanica dello sterzo è composta dal meccanismo dei normali modellini ma completamente modificato e rinforzato per reggere le sollecitazioni che si manifestano per peso e suolo da percorrere. |
|
|
|
E’
comandato da un motoriduttore a 12V. con ingranaggi in ferro. Ho
tentato di installare anche altri motorini muniti di motoriduttore con
ingranaggi in plastica ma non sono durati per più di tre sterzate. D’altra
parte Meal_00 pesa circa 20K. ed e composto di gomme abbastanza larghe e
aderenti. Il motorino è salvaguardato da dei micro fine corsa per l’arresto a destra o sinistra. Il motore che ho usato è del tipo da tergicristalli |
|
da auto, il quale mi garantisce potenza e velocità ridotta. Non
è conveniente andare veloce perché se non ho prontezza di riflessi per
comandare l’arresto può diventare pericoloso per oggetti , persone e per il
robot stesso; il motore è abbastanza potente da non riuscire a fermarlo a mano. |
|
|
|
La
velocità ridotta è corretta , perchè il percorso visto per mezzo della telecamera non ha margini di visione
aperti come dal vero, e l’operazione di controllo si presenta più semplice. La
scheda che comanda il motore sfrutta il principio del duty cycle generato da un
comune NE555 per la variazione d’impulsi. Per
il finale di potenza collegato al motore ho
usato il BDX53C opportunamente raffreddato dal dissipatore. La variazione del duty cycle è ottenuta da un |
|
potenziometro comandato da un
piccolo motorino pilotato direttamente dai tasti del trasmettitore. Con
la pressione più o meno prolungata di due tasti posso decidere la velocità di
avanzamento del robot. Meal_00
ha un motore di trazione con molta forza, non si ferma davanti a nessuna salita
o arrampicata se non si verificano slittamenti, percorre suoli impervidi (a volt Se il suo motore fosse collegato ad una catenaria salirebbe un muro portandosi dietro tutto il peso.
|
|
|
|
|
|
La Base Rotativa |
|
|
E’
la parte superiore composta da Telecamera, Luci notturne, Flah stroboscopico di
localizzazione ecc.. è movimentata da un motorino che permette di girare in
entrambi i sensi a 360°. |
|
|
Questo
mi permette di visitare per mezzo della telecamera ,completamente l’ambiente di
percorso o perlustrare la zona anche a robot fermo. La
direzione di marcia è automatica, cioè Meal_00 si dirige dove punta la
telecamera (se mi dirigo in marcia
avanti e se allo stesso tempo per mezzo del
radiocomando ruoto la telecamera nel senso opposto di marcia il robot si dirige
nel senso opposto (retromarcia). Comunque posso sempre premere il tasto |
|
|
che mi permette di fare retromarcia in ogni occasione. Non solo , ma per comodità ho installato a bordo un semplice automatismo che inverte i comandi di sterzo in maniera di avere (pilotando il robot tramite il video della tv) sempre la sterzata a destra per il comando di destra e la |
|
|
sterzata a sinistra con il comando di sinistra per qualsiasi direzione di marcia
; questo facilita le operazioni di manovra altrimenti dirigendosi nel verso opposto
avrei i comandi destra/sinistra rovesciati (si verifica su tutti i radiomodelli
commerciali). Insomma , esteticamente Meal_00 ha la sua parte anteriore e posteriore ma praticamente per i suoi automatismi il davanti e dietro è solo una convenzione. |
|
|
|
|
|
Telecamera e TX video |
|
|
La
microtelecamera installata CCD B/N è in grado di funzionare anche con
bassissimi livelli di luminosità ed è sensibile agli infrarossi. |
|
|
|
Risoluzione
orizzontale e di 380 linee , sistema standard CCIR , apertura angolare 78° e
autofocus. Per
sicurezza l’ho racchiusa dentro un contenitore plastico per salvaguardarla da
urti involontari e spruzzi d’acqua . L’immagine
video viene trasmessa alla TV tramite un trasmettitore audio/video UHF con
portante video da 543,25MHz a 615,25MHz a canali commutabili. La potenza di trasmissione è di 70mW per non superare i termini consentiti, e mi permette di |
|
raggiungere una distanza di 200 metri in linea d’aria. Lo
riconosco come l’unico inconveniente perché
il mio desiderio era quello di vedere l'immagine trasmessa almeno ad un chilometro di
distanza . |
|
|
|
Per
fare ciò è necessario un TX più potente magari in banda dei ricevitori
satellitari su 1,2GHz ma hanno un prezzo troppo eccessivo. La
trasmissione video ha un sopporto audio prelevato da un microfono preamplificato
installato in prossimità della telecamera che mi resta utile per ascoltare
rumori e voci di persone sospettose. Posso
tranquillamente comunicare (a vivavoce) con persone che sono vicine a Meal_00
perché all’interno di esso è installata un piccolo altoparlante ricavato da
un radiolina. |
|
Sicurezze |
|
Nella
parte più alta di Meal_00 è alloggiato una luce stroboscopica per
localizzazione , necessaria soprattutto per la sicurezza che qualche autovettura
sopraggiungendo non si renda conto che si sta indirizzando verso un mezzo più
piccolo e curioso; sarebbe un vero peccato. Un
lampada xenon stroboscopica a luce bianca (7 watt/sec.) con una frequenza di
lampeggio di circa 1 secondo; alimentazione a 12V ha una buona luminosità anche
di giorno. E’
installa anche una sirena (tipo allarme auto) che non conosco i sui DB di
potenza ma una volta accesa fa un gran fracasso. Fondamentalmente
non la considero una cosa basilare per il funzionamento del robot ma sicuramente
è una delle cose più divertenti che fanno saltare in aria dallo spavento
persone o animali avvicinati e incuriositi. |
|
|
![]()