La telesorveglianza
Il compito
della telesorveglianza è monitorare
il succedersi di determinati eventi di interesse, là dove è fisicamente
difficile o dispendioso mantenere in contatto visivo un operatore.
Molte delle sue
applicazioni tipiche sono d’interesse per la protezione civile, come per
esempio l’utilizzo:
·
per
controllare zone a rischio d’incendio, come boschi, pinete e parchi naturali;
·
per
controllare fenomeni vulcanici in zone in cui sono presenti vulcani ad alta
attività, come l’Etna;
·
per
controllare zone ad alto rischio sismico;
·
per
il controllo di zone interessate da dissesto idrozoologico;
·
per
controllare manifestazioni di massa, come importanti cortei, grandi feste
patronali o concerti ;
·
per
il controllo del traffico veicolare.
La telesorveglianza
può avere anche ambiti d’utilizzo commerciali:
·
Monitoraggio
di parcheggi, come quelli di grandi centri commerciali o di università.
·
Sistemi
di allarme e vigilanza;
·
Applicazioni
Turistiche.
Fra le tante applicazioni
della telesorveglianza, studieremo quella riguardante il monitoraggio del traffico veicolare. Il nostro obiettivo è
dimostrare che è possibile la realizzazione di una stazione di monitoraggio del traffico veicolare a distanza,
utilizzando:
•
un
rilevamento fotografico con un tempo di scansione prefissato;
•
una
trasmissione dati via radio con una modulazione analogica;
•
La
ricezione dei dati a distanza, e la condivisione degli stessi via Internet.
Tutto questo deve essere realizzato con
mezzi e strumenti economici e facilmente reperibili quali webcam, personal
computer, ricetrasmettitori veicolari.
Uno sviluppo possibile del sistema è
quello di utilizzare Hardware specifico per soppiantare la webcam e il pc in
modo da creare una stazione completamente stand alone con un’alimentazione non
dipendente da fonti energetiche esterne.
Requisiti della Location
Per poter
ottenere dei risultati ottimali, oltre alla scelta dei mezzi che compongono la
stazione di monitoraggio, è fondamentale la scelta di una location che abbia
determinati requisiti:
•
La
distanza della Location dall’area da
monitorare sia tale da poter visualizzare bene i veicoli nei vari fotogrammi;
•
La
visuale deve essere in gran parte libera da ostacoli che coprono alcune zone
dell’area monitorata;
•
Area monitorata
Per
sperimentare il sistema e per poter ottenere risultati abbastanza significativi,
abbiamo scelto un’area densamente trafficata di Catania, e precisamente il
crocevia fra Via Messina, Via Acicastello e viale Artale Alagona.
La zona scelta
è mostrata nella cartina in figura 1 insieme a due foto delle strade oggetto
della nostra sorveglianza.

figura1
|
foto 1 |
foto 2 |


La location scelta
è la mansarda del palazzo in foto 3.

foto 3
Un altro vantaggio della
location scelta è la possibilità di ospitare le apparecchiature in una
struttura riparata con disponibilità di energia elettrica.
Effettivamente la location soddisfa
solo due dei requisiti richiesti:
·
visuale libera;
·
possibilità di
effettuare trasmissioni radio libere da ostacoli fisici.
Il terzo importante requisito
era una adeguata distanza dalla zona monitorata, e in realtà
nel nostro caso tale distanza non ci permetteva di visualizzare bene la
zona d’osservazione.

foto 4
La
foto 4, infatti, mostra quanto detto: una normale WebCam non avrebbe potuto distinguere i veicoli transitanti. Abbiamo
realizzato così un sistema (foto 5) che “accorciasse” tale distanza servendoci
di un telescopio, un treppiedi e un supporto per

foto 5
Col sistema realizzato,
l’immagine prelevata (foto 6,7,8) viene ingrandita e corrisponde ai requisiti
richiesti dall’applicazione.

foto 6

foto 7

foto 8
Strumenti utilizzati
La nostra stazione
trasmittente è composta dai seguenti strumenti:
·
Una webcam;
·
Un personal
computer;
·
Un’interfaccia
radio;
·
Un’antenna;
·
Un trasmettitore.
Uno
degli obbiettivi della tesina è l’utilizzo di componenti Low-Cost: in questa filosofia, abbiamo utilizzato con successo un personal computer ormai obsoleto,
facilmente reperibile anche sotto forma di Surplus. Le sue caratteristiche HW
sono:
·
Processore Intel
Pentium II Celeron 300 MHz;
·
Memoria 128 MB;
·
HDD Quantum
Fireball Formattato a 12 GB.;
·
Scheda Video S3
Virge;
·
Scheda Audio
SB128 della Creative;
·
Supporto delle
porte USB.
Possiamo
dire che, per quel che riguarda alcune caratteristiche, il sistema risulta
sovradimensionato (per esempio hard disk o scheda video). Sono però di
fondamentale importanza la qualità della sound blaster e una certa quantità di
memoria.
Le caratteristiche SW del PC
sono:
·
Sistema Operativo
MS Windows98 SE;
·
Software
applicativo CHROMAPIX della Silicon Pixels;
·
Drivers della
WebCam e della Sound Blaster.
Il
cuore di tutto il sistema è proprio il Chromapix. Esso si fa carico della scansione
temporizzata dalla webcam e della conversione dell’immagine ricevuta in un
output audio secondo un determinato standard analogico SSTV denominato Robot36.
SSTV
Lo
Slow ScanTelevision è un sistema
analogico che ci permette di trasmettere immagini statiche su un canale audio. La risoluzione delle immagini e il tempo di
scansione variano a seconda che l’immagine è in bianco e nero o a colori.
Le
caratteristiche tecniche importanti, come per tutti i sistemi televisivi, sono:
·
Ampiezza di banda disponibile;
·
Frequenza di
scansione orizzontale/verticale;
·
Impulsi di sincronizzazione;
·
Risoluzione dell’immagine;
·
Rappresentazione
dei toni di grigio o dei colori.
Per quanto riguarda
l’ampiezza di banda disponibile, essa non deve superare 3 kHz, caratteristica
fondamentale, dal momento che tale modulazione è stata sviluppata per canali
per trasmissioni vocali.
La frequenza di scansione si
divide in scansione verticale e scansione orizzontale: la prima si misura in
immagini/secondo, mentre la seconda si misura in linee per minuto.
La sincronizzazione avviene
mediante impulsi in frequenza di 1200 Hz.
Gli impulsi di
sincronizzazione si dividono in:
·
Sincronizzazione
verticale: la durata dell’impulso all’inizio dell’immagine è di 300 ms;
·
Sincronizzazione orizzontale: ogni
linea dell’immagine è composta da un impulso a 1200 Hz della durata
di 5 ms, seguito dalla rappresentazione in modulazione di frequenza della
linea.
La
risoluzione delle immagini influenza il tempo di trasmissione: più alta è la
risoluzione, maggiore è il tempo di trasmissione. É importante sottolineare che
la risoluzione dell’immagine trasmessa è inferiore a quella originale.
Il
sistema di conversione delle immagini si basa sulla trasformazione dei vari
toni di grigio dell’immagine in un segnale audio modulato in frequenza dove
ogni tono di grigio corrisponde ad una determinata frequenza (figura 2) nella
banda che va da 1500 Hz a 2300 Hz: un punto
bianco viene trasformato in un segnale a 2300 Hz, mentre un punto nero in un
segnale a 1500 Hz.
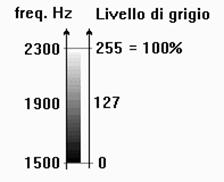
figura 2
Il colore
dell’immagine può essere rappresentato dalle sue componenti cromatiche, rosso,
verde e blu. In tale maniera per ogni pixel dell’immagine si devono mandare tre
componenti con un certo spreco di banda, l’occhio umano però non è molto
sensibile alle singole sfumature dei vari colori, pertanto è possibile
semplificare l’informazione trasmessa senza alterare eccessivamente la qualità
dell’immagine.
Per ridurre l’informazione da trasmettere si usano due segnali:
SSTV: Metodi di Trasmissione.
Esistono
vari metodi di trasmissione per
I metodi Robot, Scottie, Martin e Wraase sono più limitati nella risoluzione
dell’immagine da trasmettere ma sono supportati dalla maggior parte dei
software; essi trasmettono immagini a colori e in bianco e nero impiegando un
tempo basso nella scansione dell’intera immagine.
I metodi Pasokon e PD permettono invece la trasmissione d’immagini
ad alta risoluzione ma conseguentemente aumenta il tempo di trasmissione
superando i sei minuti.
Come detto in precedenza, il metodo da noi utilizzato è il Robot.
Un’implementazione di tale metodo è lo standard Robot 36, che consente la codifica del
colore in segnale composito. Esso consente trasmissioni di immagini a colori a
320 colonne e 240 righe in un tempo di 36 sec.
L’interfaccia radio.
In genere un ricetrasmettitore, per passare dalla ricezione (rx) alla trasmissione (tx), ha
bisogno di un comando dato da un interruttore, il cosiddetto PTT (Push To
Talk).
Il
ricetrasmettitore si trova in ricezione quando il circuito del PTT è aperto e
quindi, vede un’impedenza infinita. Invece, quando il circuito è chiuso e
quindi si ha impedenza nulla, il ricetrasmettitore va in trasmissione.
Per
realizzare tale comando abbiamo usato un transistore che ha proprio la
caratteristica di presentare in uscita un’impedenza infinita o nulla in base
alla sua polarizzazione (figura 3).
figura 3
Per fornire la giusta
polarizzazione abbiamo sfruttato una caratteristica del Chromapix che,
comandando la porta seriale del PC, permette di ottenere sul canale RTS,
·
Per
·
Per
Lo
standard RS 232 (quello della seriale) infatti, prevede un valore di 12V per lo
zero logico e -12V per l’uno logico. Tale tensione ci consente di polarizzare
in interdizione o in saturazione un BJT e di ottenere la trasmissione comandata
da Software.
La realizzazione di tale
circuito è arricchita anche :
·
da un circuito di
collegamento fra

foto 10
·
da un led, che
rivela sostanzialmente il comando di trasmissione e da un interruttore che
isola il pc dal trasmettitore, e che serve a
fare delle prove senza dover trasmettere (foto 11);
foto 11
·
da un involucro
esterno “riciclato” (foto 12);

foto 12
·
dai connettori
utilizzati da radio e pc (foto 13).

foto 13
Il sistema di trasmissione
Per ottimizzare al massimo il nostro sistema, avremmo
bisogno di un canale ideale con le seguenti caratteristiche:
·
che sia lineare
entro la banda 1.1 – 2.5 KHz;
·
che presenti
quantità di disturbi trascurabili;
·
che non introduca
fading o fenomeni di riflessione multipla;
·
che sia riservato
o difficilmente accessibile;
·
che non presenti
zone d’ombra.
Ma la politica low-cost fin qui adottata ci impone
l’utilizzo di apparati ricetrasmittenti economici che disattendono in gran
parte le caratteristiche elencate. Per dimostrare comunque l’efficienza del
sistema, abbiamo utilizzato ricetrasmettitori in banda 27 MHz, la cosiddetta
Banda Cittadina.
Gli effetti negativi
dell’utilizzo di tale frequenza causano una effettiva perdita di nitidezza
nell’immagine. Inoltre questa può presentare a tratti disturbi più o meno
evidenti dovuti a sovramodulazione dei disturbi.
Guardando le due foto (foto
14 e 15) sotto, possiamo osservare la differenza qualitativa fra l’immagine
catturata dalla webcam e quella ricevuta dalla stazione base.

foto 14: immagine
trasmessa
foto 15: immagine
ricevuta

L’apparato trasmettitore da noi utilizzato è il Veicolare “Super Cheetha”, un po’ datato
ma abbastanza completo.
La frequenza utilizzata è 27.865 , in una banda
leggermente superiore a quella cittadina al fine di avere canali più puliti.
Date le buone prestazioni offerte in termini di
linearità da una modulazione ad ampiezza costante, abbiamo scelto la
modulazione FM per supportare il segnale prodotto dalla Sound Blaster.
L’antenna utilizzata è una Ground Plane di 5.5 mt che,
nella location scelta, non ha visibilità ottica con l’antenna ricevente. A tale
problema ci viene incontro però il fatto che siamo ancora in banda HF e che
quindi la propagazione è terrestre e le riflessioni con palazzi circostanti a
questa frequenza possono risultare utili.
Prove effettuate
Dal 24 giugno è in funzione
la nostra stazione di trasmissione. Da quel giorno numerose
sono state le regolazioni effettuate per consentire la ricezione di immagini
chiare.
Inizialmente abbiamo tentato
l’invio di immagini a colori utilizzando in ricezione il software MSSTV.
Come possiamo vedere dalla
foto 16, l’immagine risultava totalmente compromessa, probabilmente a causa di
un cattivo sincronismo. L’informazione cromatica era shiftata su una colonna
centrale e a stento si coglievano blandi particolari.
foto 16

Abbiamo pensato quindi di utilizzare immagini a toni
di grigio (nel controllo del traffico può non essere necessaria l’informazione sul
colore), alleggerendo così i compiti dell’intero sistema. L’immagine (foto 17), decodificata da MSSTV è
giunta molto nitida, come dimostrato dalla marca temporale in basso; i colori
invece erano falsati dal fatto che l’MSSTV non supportava la trasmissione a
toni di grigio.

foto 17
Abbiamo convertito la stessa immagine a toni di grigio
(foto 18 ) e possiamo vedere che sono ora più evidenti i dettagli della strada.

foto 18
Spingendoci oltre abbiamo supposto che il vero problema
fosse una cattiva decodifica da parte del software MSSTV, magari dovuta alla
non raffinata implementazione dei filtri digitali nel software stesso.
Utilizzando il Cromapix
anche in ricezione e la trasmissione a colori si sono subito avuti risultati
eccellenti (foto 19).
foto 19

Viste in sequenza, le immagini, forniscono
un’indicazione sull’andamento del traffico nell’arco di tutte le 24 ore. Sotto
ci sono alcune delle foto più significative della giornata del 9 luglio,
partendo dalle ore 14.30 e terminando alle ore 14.30 del giorno successivo.



Purtroppo la parte inferiore di ogni immagine ricevuta presenta dei disturbi attribuiti al non perfetto sincronismo. Tale difetto, ad oggi irrisolto, non limita comunque la chiarezza delle foto ricevute, dalle quali è evidente il traffico veicolare.
Conclusioni
Il sistema si presenta molto versatile, ed inoltre la
stazione ricevente può monitorizzare sino a 5 stazioni remote.
Esistono prodotti commerciali che sostituiscono il PC
e la webcam per la scansione fotografica e la trasformazione dell’immagine in
segnale audio.
Una stazione Stand Alone di rilevamento può essere
composta semplicemente da:
•
Rilevatore
SSTV(foto 20);
•
Apparato trasmittente e antenna;
•
Pannello fotovoltaico e circuito di controllo;
•
Batteria tampone.
foto 20

Tutto è racchiuso da un semplice involucro esterno
(eccetto antenna e pannello solare) e posizionato in punti chiave quali
segnaletica stradale, facciate dei palazzi e lampioni di illuminazione o
semafori.
Il sistema risulta essere un valido ed economico metodo
di telesorveglianza.
Un suo adeguato dimensionamento è importante per
ottenerne la massima efficienza.
Un ulteriore vantaggio è che una volta avviato, il
sistema richiede pochissima manutenzione.