2 PRINCIPIO DI FUNZIONAMENTO

fig.
2.1 Principio di funzionamento con una linea di ritardo
Il segnale di ingresso, proveniente dall’oscillatore, nella sua forma più generale può essere espresso nel seguente modo:
![]()
dove Ar(t) è la tensione fornita
dall’oscillatore, con il rumore associato in ampiezza, e Fr(t) la variabile aleatoria
relativa al rumore di fase.
L’uscita dal blocco di ritardo, cioè il nostro cavo, sarà data dalla
traslazione temporale dell’ingresso.
Supponiamo di volere trattare il caso più generale:
ammettiamo che l’oscillatore non sia preciso nell’emissione della sinusoide,
cioè la sua frequenza vari nel tempo; questo significa che:
![]()
Pertanto il segnale ritardato avrà la seguente
forma:
![]()
La condizione che dobbiamo realizzare affinché il
mixer + filtro ci restituisca il segnale in banda base è la seguente:
![]()
Si può osservare come sia possibile scegliere, per
soddisfare questa condizione, di variare la lunghezza del cavo, per modificare t oppure la frequenza w.
Tenendo presente la possibile introduzione di un errore che chiamiamo Ferr si ha:
![]()
Oltre ad eventi imperscrutabili nel circuito
generale, va ricordato che è presente anche il power splitter, il quale
introduce uno sbilanciamento di fase tra le due uscite, cioè tra il segnale che
entra nell’ingresso del mixer LO e quello che passa attraverso la linea di
ritardo.
Il segnale ritardato può così assumere la seguente espressione:
![]()
I segnali che entrano in RF e LO vengono moltiplicati dal mixer e il
segnale che esce è il seguente:
![]()
![]()
dove Vref è la tensione di riferimento
del mixer.
Supponiamo di effettuare un filtraggio ideale:
![]()
![]()
questo segnale tiene quindi conto di errori di
calibrazione dello sfasamento,
problemi di stabilità della frequenza e rumore di ampiezza e di
fase. In genere, il rumore
associato in ampiezza è molto più piccolo rispetto a quello di fase e
sicuramente più facile da eliminare. Trascuriamo pertanto il rumore di
ampiezza; la formula allora diventa:
![]()
dove V è la tensione priva di rumore che può
facilmente essere ricavata dalle specifiche del mixer.
Ora prendiamo in esame tre casi: il primo, dove sarà
possibile ritenere dwerr trascurabile (per
oscillatore come l’HP8647A), il secondo costante e per ultimo il caso più
generale variabile nel tempo.
2.1 CASO dwerr=0
Il segnale sotto questa ipotesi diventa:
![]()
Essendo poi le quantità tra parentesi molto piccole
possiamo scrivere:
![]()
dove
![]() . Essendo Fr(t)
la variabile aleatoria relativa al rumore di fase, significa che questa è a media nulla, pertanto anche la Fz(t)
avrà media nulla. Possiamo allora
ricordare l’errore di calibrazione dello sfasamento:
. Essendo Fr(t)
la variabile aleatoria relativa al rumore di fase, significa che questa è a media nulla, pertanto anche la Fz(t)
avrà media nulla. Possiamo allora
ricordare l’errore di calibrazione dello sfasamento:
![]()
quindi variando la frequenza w, fino a quando V(t) ha la componente continua nulla, avremo eliminato l’errore Ferr e l’uscita sarà:
![]()
Anche se però non riuscissimo ad eliminare completamente l’errore, non ci sarebbero grossi problemi, in quanto la componente continua introduce solamente una delta nell’origine, senza produrre alcuna distorsione dello spettro. Quindi si ha esattamente lo spettro della variabile Fz(t) , cioè
![]()

fig. 2.2 Spettro Fz(t)
Più avanti verrà trattato il problema della correlazione tra Fr(t) e la Fr(t-t).
2.2 CASO dwerr¹0
Il segnale che dobbiamo esaminare è:
![]()
Possiamo innanzitutto inglobare in una costante di
errore la Ferr e dwerrt :
![]()
Poniamo come prima ![]() e otteniamo:
e otteniamo:
![]()
che può essere vista anche come:
![]()
dove ![]() .
.
Supponiamo che Fz(t) <<1 radiante per
ogni t, del tutto ragionevole.
Allora possiamo scrivere:
![]()
Trasformando si ha:
![]()

fig.
2.3 Spettro di v(t)
Ovviamente se l’errore della frequenza è molto
piccolo sarà pressoché impossibile
osservare la delta dirac.
Pertanto, se si ha un errore sulla calibrazione dello sfasamento, questo
non intaccherà lo spettro; al massimo introdurrà una delta nell’origine, come
abbiamo visto in precedenza. Se, invece, si ha un errore di frequenza, questo
aggiungerà una distorsione non lineare dello spettro.
2.3 CASO dwerr=F(t)
Questo rappresenta senz’altro il caso più generale e
più complesso. Sotto questa ipotesi possiamo solo affermare che lo spettro che
si vede in uscita sarà uno spettro come il precedente. Ad ogni acquisizione si
osserverà uno spettro che cambia in continuazione variando le delta posizionate
in fe(t).
3 Considerazioni riguardanti Fz(t)
Come abbiamo visto la variabile aleatoria che viene
visualizzata non è, come si vorrebbe, la sola Fr(t) , ma appunto la ![]() . E’
necessario capire cosa succede quando si sottrae la stessa variabile aleatoria
ritardata nel tempo. Vediamo per
prima cosa il caso ideale in cui queste due variabili aleatorie Fr(t) e Fr(t-t) siano incorrelate.
. E’
necessario capire cosa succede quando si sottrae la stessa variabile aleatoria
ritardata nel tempo. Vediamo per
prima cosa il caso ideale in cui queste due variabili aleatorie Fr(t) e Fr(t-t) siano incorrelate.
3.1 INCORRELATE
Per la dimostrazione si veda quella del paragrafo
successivo 3.2.
Essendo le variabili incorrelate si deve porre r=0 e otteniamo:
![]()
cioè la varianza della variabile stessa e di quella
ritardata si sommano.
3.2 CORRELATE
Per questa dimostrazione ipotizziamo di avere sempre
due variabili gaussiane X e Y a media nulla e con varianza sx2 e sy2 . Definiamo Z=X-Y e cerchiamo di trovare la varianza di Z.
Essendo X e Y a media nulla anche Z avrà media nulla. Quindi:
![]()
dove r è il coefficiente di
correlazione.
Applichiamo il risultato al nostro caso dove X e Y
hanno le stesse statistiche.
![]()
La varianza sr2 la si ricava
sperimentalmente con l’HP8561E .
Il problema è determinare il coefficiente di correlazione. Notiamo che se le variabili sono
incorrelate, cioè r=0, ritroviamo il caso
precedente.
3.3 SPETTRO DI Fz(t)
Il fatto che le due variabili siano correlate o meno
non modifica la forma dello spettro, pertanto in uscita non avremo alcuna
distorsione. Questo è di vitale
importanza altrimenti l’intera esperienza fallirebbe, perché ci troveremmo
nell’impossibilità di risalire al vero spettro del rumore di fase. Quello che cambia è sostanzialmente
l’area sottesa: tanto più le variabili sono correlate, tanto più l’area è
minore. In altre parole si ha una riduzione dell’intero profilo del rumore di
fase. Quindi se siamo interessati alla banda del rumore non ci sono problemi,
quella rimane inalterata, se invece vogliamo sapere il valore della potenza del
rumore di fase è necessario stabilire con precisione il coefficiente di
correlazione.
fig.
3.1 Esempio di segnale attenuato che mantiene la stessa banda
In questa figura possiamo vedere un segnale e il
segnale stesso attenuato di una certa quantità. Come notiamo la banda è la
stessa, mentre l’area del rettangolo risulta notevolmente inferiore. Da un punto di vista analitico, data la
funzione del modulo al quadrato della trasformata, T(f), so che T(0)=A
rappresenta la potenza di centro banda. Per individuare la banda cerco dove
questa si dimezza, cioè T(B)=A/2.
Supponiamo di attenuare di un fattore K questa funzione, allora abbiamo
che KT(0)=AK. La banda si troverà
dove la potenza si dimezza, quindi KT(X)=AK/2, cioè ancora per X=B.
4 STIMA DELLA TENSIONE IN USCITA
4.1 TEMPO DI COERENZA
Quello che intendiamo di seguito realizzare è una stima molto grossolana del coefficiente di correlazione. Attraverso metodi numerici si potrebbe fornire una caratterizzazione molto migliore. Infatti raccogliendo con l’HP8561E i dati in caratteri ascii e antitrasformando la densità spettrale di potenza del rumore di fase (che chiamiamo Sx(f)) otterremmo il coefficiente di autocorrelazione Rx(t), visto che:
![]()
Una volta trovata la funzione di autocorrelazione possiamo trovare il tempo di coerenza tc definito come:
![]()
![]()
Essendo poi l’autocovarianza per definizione:
![]()
si
vede come ![]() , essendo il rumore a media nulla.
, essendo il rumore a media nulla.
Notiamo anche come la:
![]()
è la varianza sx2 . Quindi attraverso metodi matematici è possibile risalire al tempo di coerenza.
4.2 DETERMINAZIONE DEL
COEFFICIENTE DI CORRELAZIONE
Una volta stimato il tempo di coerenza possiamo fare una interpolazione lineare e, in base al ritardo della linea trovare il coefficiente, di correlazione, secondo il seguente sistema:

fig. 4.1 Coefficiente di correlazione
Pertanto, stimato il tempo di coerenza (come abbiamo visto in precedenza) si applica la seguente formula:

4.3 STIMA DEL TEMPO DI COERENZA TRAMITE LO SPETTRO LORENZIANO
Se,
come nel nostro caso, risulta di difficile applicazione risalire attraverso
metodi numerici alla funzione di autocorrelazione Rx(t), possiamo servirci di questa trattazione:
importa sottolineare subito che è una stima molto grossolana e risulta tanto
più precisa quanto più il profilo del rumore di fase si avvicina allo spettro
lorenziano, cioè decresce come 1/f2 . Dato un processo stocastico
X(t) WSS in media nullo e ![]()

fig. 4.2 Autocorrelazione dello spettro lorenziano
abbiamo
![]() . Lo spettro a
cui corrisponde una siffatta autocorrelazione è il seguente:
. Lo spettro a
cui corrisponde una siffatta autocorrelazione è il seguente:
![]()

fig. 4.3 Spettro lorenziano
Pertanto,
individuando il termine che sta nell’origine (che chiamiamo ![]() ) e la
varianza s2 , siamo in grado di stimare il tempo di coerenza.
) e la
varianza s2 , siamo in grado di stimare il tempo di coerenza.
4.4 STIMA DELLA FUNZIONE
DI AUTOCORRELAZIONE TRAMITE LO SPETTRO DI FREQUENZA
E’ possibile fare una misura più accurata, nel caso
il profilo di rumore di fase non coincidesse con quello dello spettro lorenziano
(come nel nostro caso dove il primo tratto scende come 1/f3),
tramite lo spettro di frequenza.
Dal paragrafo 1 abbiamo visto una nota relazione che lega la densità
spettrale di rumore di frequenza Sf(f) con quella di fase Sf(f):
![]()
moltiplicando per ![]() e integrando:
e integrando:

Vediamo che cosa rappresenta il primo membro
dell’equazione:

Quindi, ricordando che per segnali reali e pari
(come per il rumore di fase):


sostituendo nella precedente otteniamo:

Invece il secondo membro può essere scritto come:

Se scegliamo, in base al nostro grafico di Sf(f) o Sf(f), un Df <1/t opportuno, possiamo fare la
seguente approssimazione:

in quanto la sinc sarebbe circa unitaria e l’altro
addendo fuori dalla banda del convertitore. La varianza di rumore di
frequenza può essere calcolata con l’HP8561E. A questo punto, essendo Sf(f) reale e pari, si ha che
anche la sua funzione di autocorrelazione è reale e pari; quindi:
![]()
Andando a sostituire l’espressione ottenuta nel
paragrafo 2.2 possiamo ricavare la varianza della variabile Fz(t) , come:
![]()
t ,che rappresenta nel nostro caso il ritardo introdotto dal cavo, sarà l’elemento determinante nella scelta opportuna della frequenza, di modo che sia soddisfatta Df <1/t e valga l’approssimazione fatta.
4.5 STIMA DELLA TENSIONE
IN USCITA
Abbiamo visto, sostanzialmente due modi per giungere alla misura della varianza di Fz(t): uno tramite lo spettro lorenziano e l’altro tramite un contatore. Una volta trovata la varianza, per determinare la tensione picco-picco è sufficiente moltiplicare per 6 (intervallo che contiene il 99.7% del rumore). Mettendoci nel caso ideale, visto al paragrafo 1.1, abbiamo che
![]()
Pertanto con lo spettro lorenziano otteniamo:

dove K è il termine corrispondente a Sx(0)
dello spettro lorenziano. Utilizzando invece il secondo metodo, cioè quello
dello spettro di frequenza, otteniamo:
![]()
Osserviamo fin da ora come, aumentando la linea di ritardo, aumenti la tensione di uscita, in modo più o meno proporzionale, a seconda del metodo utilizzato. Questo è vero entro la regione di correlazione, cioè per t<tc . Se riusciamo a realizzare un sistema per cui t>tc , allora:
![]()
REALIZZAZIONE
5 DESCRIZIONE DELLO SCHEMA

fig. 5.1 Misura rumore di fase
Nella connessione dei vari blocchi dello schema è
sempre stato utilizzato un cavo RG223 adattato a 50W. I cavi sono terminati con connettori BNC e
ogni strumento di misura utilizzato è stato adattato a 50W per evitare la riflessione del segnale.
Si nota anche la presenza di due filtri passa basso
necessari per eliminare il segnale a frequenza doppia (rispetto ai 50 MHz)
presente all’uscita del mixer.
.
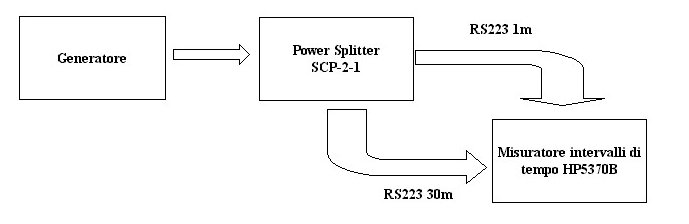
fig.
5.2 Misura ritardo del cavo
6 CARATTERIZZAZIONE DEI COMPONENTI
6.1 CARATTERIZZAZIONE
DEL CAVO RG223 E DELL’ATTENUATORE 6dB
Per caratterizzare il cavo abbiamo effettuato misure
di ritardo e attenuazione.
Anzitutto è stata effettuata la misura di lunghezza del cavo utilizzando
un metro (con fondo scala 5m). Vista
la notevole estensione del cavo, quest’ultimo è stato suddiviso in sei tratti
ed è stata determinata la lunghezza di ciascun di essi.
Per quanto riguarda gli errori sistematici della
misura si può supporre un’incertezza pari a 2mm per ogni singolo tratto, che,
ipotizzando una distribuzione di tipo gaussiano, porta ad una incertezza totale
di tipo B pari a 4,9 mm. Per
diminuire anche l’incertezza di tipo A, è stata effettuata una serie di misure
che ha portato al calcolo del valor medio di lunghezza del cavo pari a 2968,6
cm con incertezza di tipo A pari a 4,3mm.
Quindi la lunghezza del cavo risulta essere: (29686 ± 6,5)mm. Per quanto riguarda le misure di ritardo si è utilizzato il
frequenzimetro HP5370B (vedi specifiche in appendice) impostato per la misura
di intervalli di tempo, con canale di start e stop separati, livello di trigger
a 0V e sensibile ai fronti di salita.
Lo strumento permette inoltre di visualizzare automaticamente il valor
medio e la deviazione standard calcolati su un determinato valore di campioni.
Nelle nostre misure tale valore (N) corrisponde a 10000. I risultati delle misure sono
raccolti nella seguente tabella:
|
f[MHz] |
Ritardo RG223 [ns] |
Incertezza tipo del ritardo RG223 28,6m[ns] |
Ritardo per unità di lunghezza[ns/m] |
Incertezza tipo ritardo RG223 per unità di lunghezza [ns/m] |
|
0,4 |
149,78 |
14,25 |
5,05 |
0,48 |
|
0,7 |
149,2 |
8,18 |
5,03 |
0,28 |
|
1,0 |
148,77 |
5,77 |
5,01 |
0,19 |
|
2,0 |
148,09 |
3,01 |
4,99 |
0,10 |
|
4,0 |
147,43 |
1,74 |
4,97 |
0,06 |
|
7,0 |
146,76 |
1,29 |
4,94 |
0,04 |
|
10,0 |
146,32 |
1,15 |
4,93 |
0,04 |
|
20,0 |
145,68 |
1,04 |
4,91 |
0,04 |
|
40,0 |
145,21 |
1,01 |
4,89 |
0,03 |
|
70,0 |
144,84 |
1,01 |
4,88 |
0,03 |
Tab.
6.1 Ritardo senza attenuatore
Per rimanere nella zona di funzionamento lineare del
mixer (SBL-1, vedi specifiche in appendice), l’ingesso RF può sopportare al massimo 1 dBm. Quindi,
inserendo in ingresso al circuito 13dBm, otteniamo in uscita al power splitter
una potenza di poco inferiore ai 10 dBm, la quale viene ulteriormente attenuata
dal cavo ma in quantità non sufficiente da rimanere entro le specifiche del
mixer. Questo ci obbliga all’utilizzo di un attenuatore da 6 dB che riduce la potenza del segnale in
uscita della linea di ritardo. Per sfruttare al meglio la dinamica del mixer si è settata la potenza in
uscita dal generatore di segnale a 13 dBm, in modo da ottenere, a valle
dell’attenuatore, 1 dBm. Tutto ciò
ci ha portati a ripetere la stima del ritardo che, come si nota dalla tabella
sottostante, non si discosta significativamente da quelle ottenute senza
attenuatore.
Ultima cosa da tenere presente è che il ritardo
stimato è quello di 28,6 metri di cavo, visto che per le interconnessioni tra
power splitter e mixer è stato utilizzato un cavo di 29,6 metri in ingresso a
RF e di (1070 ± 2,3)mm in ingresso a LO (la lunghezza di quest’ultimo è
stata stimata effettuando più prove e ipotizzando un errore sistematico di
2mm).Quindi il ritardo è da imputarsi a (28616±6,9) mm di cavo RG223.
|
f[MHz] |
Ritardo[ns] |
Incertezza tipo del ritardo RG223 28,6m [ns] |
|
0,4 |
148,85 |
14,25 |
|
0,7 |
148,66 |
8,18 |
|
1,0 |
148,47 |
5,77 |
|
2,0 |
148,09 |
3,01 |
|
4,0 |
147,62 |
1,74 |
|
7,0 |
146,98 |
1,29 |
|
10,0 |
146,49 |
1,15 |
|
20,0 |
145,95 |
1,04 |
|
40,0 |
145,42 |
1,01 |
|
70,0 |
145,07 |
1,01 |
Tab.
6.2 Ritardo con attenuatore da 6dB
E’ stato riportato anche il grafico dei ritardi in base ai dati delle tabelle precedenti.
fig.
6.3

Ritardo cavo con e senza attenuatore
Per quanto riguarda le misure di attenuazione sono state effettuate diverse serie di prove per ridurre gli errori di tipo A e, al variare della frequenza del segnale in ingresso, abbiamo ottenuto il seguente risultato:
|
f[MHz] |
Attenuazione cavo 30m [dB] |
Incertezza tipo cavo [dB] |
Attenuazione 30m+attenuatore [dB] |
Incertezza tipo cavo +attenuatore [dB] |
|
2 |
0,56 |
0,06 |
6,26 |
0,03 |
|
4 |
0,71 |
0,06 |
6,53 |
0,03 |
|
7 |
1,04 |
0,06 |
6,79 |
0,03 |
|
10 |
1,28 |
0,06 |
7,01 |
0,03 |
|
20 |
1,90 |
0,05 |
7,63 |
0,03 |
|
40 |
2,76 |
0,05 |
8,50 |
0,02 |
|
70 |
3,76 |
0,04 |
9,49 |
0,02 |
|
100 |
4,59 |
0,04 |
10,34 |
0,02 |
|
200 |
6,72 |
0,03 |
12,49 |
0,02 |
|
400 |
9,88 |
0,02 |
15,69 |
0,02 |
Tab 6.4 Attenuazione cavo RG223 e attenuazione cavo RG223 + Attenuatore
6dB
Si può notare dal grafico precedente che il comportamento dell’attenuatore è costante al variare delle frequenze di lavoro. Possiamo confermare tale affermazione guardando i dati riportati nella tabella sottostante e il grafico successivo.
|
f[MHz] |
Attenuazione dell’attenuatore [dB] (6 dB nom) |
Incertezza tipo attenuatore[dB] |
|
2 |
5,70 |
0,03 |
|
4 |
5,82 |
0,03 |
|
7 |
5,75 |
0,03 |
|
10 |
5,73 |
0,03 |
|
20 |
5,73 |
0,03 |
|
40 |
5,74 |
0,03 |
|
70 |
5,73 |
0,03 |
|
100 |
5,75 |
0,03 |
|
200 |
5,77 |
0,03 |
|
400 |
5,81 |
0,03 |
Tab 6.5
Caratterizzazione attenuatore 6dB

Fig 6.6 Caratterizzazione attenuatore 6 dB

Fig.
6.7 Caratterizzazione cavo con e senza attenuatore
7 FREQUENZA DI LAVORO
Nel paragrafo 2 abbiamo visto come la condizione che si deve soddisfare, per il corretto funzionamento del circuito, è:
![]()
quindi abbiamo scelto di variare la frequenza f, piuttosto che il ritardo t per ovvi motivi di praticità e di precisione.

Tenendo presente che abbiamo a disposizione filtri da 5Mhz e da 10Mhz, dobbiamo scegliere frequenze che siano almeno un ordine maggiore, per esempio intorno a 50 Mhz, di modo che la frequenza IF a 100Mhz possa essere soppressa correttamente. Inoltre è bene non aumentare di molto la frequenza, altrimenti la linea di ritardo attenuerebbe troppo e non si riuscirebbe pilotare al meglio il mixer. Infatti, con tale frequenza, abbiamo in ingresso alla porta LO 9.4dBm e a quella RF 0.66dBm, cioè le condizioni ideali di funzionamento del mixer in zona lineare; in questo modo si ottiene la massima tensione in uscita. In altre parole sono le condizioni in cui riusciamo ad avere il parametro V più alto.
Un altro motivo per non incrementare ulteriormente la frequenza è dato dalle specifiche dell’oscillatore:
fig. 7.1 Rumore di fase dell’oscillatore data dal
costruttore
Si vede che, aumentando la frequenza della portante, il rumore di fase diminuisce. Quindi, scegliendo n=7, si ottiene un buon compromesso. Allora la frequenza di lavoro risulta:
f= (49,97±0,35)MHz

fig. 7.2 Sfasamento prima dell’ingresso nel mixer
In seguito abbiamo visto, sempre nel paragrafo 2, come è possibile annullare l’errore di calibrazione variando la frequenza, fino ad ottenere una componente continua nulla all’uscita dal mixer. Questo tipo di calibrazione deve essere effettuato ogni volta che si opera, in quanto la frequenza di lavoro è molto sensibile alle variazioni dei parametri del circuito. Riportiamo un valore tipico di componenete continua presente in uscita:

fig. 7.3 Dc alla frequenza .

fig. 7.4 Dc dopo calibrazione.
La frequenza dopo la calibrazione è risultata 49 962 300 Hz.
8 DIAGRAMMA DEL RUMORE DI FASE DELL’OSCILLATORE HP8561E
Il segnale in ingresso era di tipo sinusoidale a 50 Mhz con una potenza pari a 10dBm. In ordinata abbiamo valori tracciati in dBc, mentre in ascissa sono riportate le frequenza in scala logaritmica. Utilizzando lo strumento HP8561E, il quale offre la possibilità di misurare il rumore di fase, abbiamo trovato il seguente spettro L(f) per il generatore HP8647A:

fig. 8.1 Rumore di fase L(f) acquisito
Una precisazione per quanto riguarda le unità di misura. La L(f) in questo grafico è espressa in dBc/Hz, cioè:
![]()
dove Pssb è la potenza del rumore in banda di 1Hz su una singola banda, mentre Ptot è la potenza del segnale in ingresso.
La stessa può essere espressa come:
![]()
Applicando l’approssimazione attraverso le funzioni di Bessel, se F<<1:
![]()
Quindi possiamo esprimerla anche in rad2/Hz
se è rumore di fase, come in questo caso. Potrebbe essere espressa in Hz2/Hz
se si trattasse di rumore di frequenza semplicemente applicando la conversione.
Poi bisogna tenere conto che questo è uno spettro unilaterale. La relazione per
trovare lo spettro del rumore di fase è:
![]()
Sempre grazie all’HP8561E abbiamo poi integrato lo spettro tra 100hz e 100khz, ottenendo il valore della deviazione standard di rumore pari a circa 18mrad.

Abbiamo scelto questi estremi in quanto la banda del
convertitore fornitoci dal gruppo che si occupa della parte in banda base, ha
questi limiti.
9 TENSIONE DI USCITA
Per semplicità ci poniamo nella condizione trattata al paragrafo 2.1, in quanto l’oscillatore HP8647A rilascia frequenze piuttosto stabili. La tensione di uscita avrà un andamento del tipo:
![]()
Abbiamo variato la frequenza di lavoro sino ad annullare la componente media, in modo tale da poter considerare l’errore Ferr nullo (si veda il paragrafo 2.1 per maggior chiarezza in proposito). Allora la tensione in uscita assume l’espressione:
![]()
che ha un andamento come quello mostrato dalla
figura 1.1.
Per quanto riguarda le unità di misura V rimane ovviamente in Volt, mentre la Fz , che verrà espressa con la sua deviazione (rad per rumore di fase, Hz per rumore di frequenza), sarà adimensionale, vista l’approssimazione del seno con il suo argomento.
Alternativamente possiamo vedere la V come V/rad o V/Hz.
Nel paragrafo 3 abbiamo analizzato il problema della correlazione tra la variabile Fr(t) e Fr(t-t) e in quello successivo abbiamo visto due metodi per determinarlo:
· Metodo
dello spettro lorenziano
![]()
· Metodo
dello spettro di frequenza
![]()
Abbiamo
anche visto come il massimo che posso ottenere ![]() , nel caso t>tc
.
, nel caso t>tc
.
9.1 DETERMINAZIONE
DELLA COSTANTE V
Per determinare la costante V abbiamo operato in questo modo: sapendo che dall’uscita del mixer non filtrata si ha un segnale del tipo:
![]()
Filtrando la precedente con un semplice passa banda
in modo da ottenere solo la componente a 2w, determiniamo con l’oscilloscopio l’ampiezza
V:
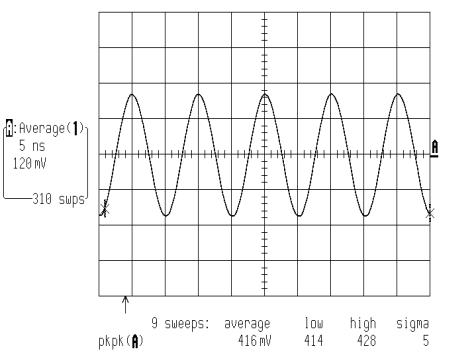
fig. 9.1 Sinusoide 2w
![]()
Vediamo se corrisponde con quello del data sheet:
dalle specifiche del mixer possiamo ricavare la perdita di conversione solo per
un’onda IF a 30Mhz. Sapendo che in RF e LO entrano, alla nostra frequenza
lavoro, rispettivamente 0.56dBm e 9.4dBm, ricaviamo una conversion loss per una
IF a 30Mhz di 5.47dBm. In uscita mi aspetto un segnale con una potenza di circa
–4.91dBm, cioè V=179mV. La differenza di 29mV è del tutto ragionevole, visto
che mancano specifiche per LO e RF ad una stessa frequenza.
9.2 METODO DELLO
SPETTRO LORENZIANO
Nel paragrafo 4 abbiamo visto come il ruolo del parametro K è dato dal valore dell’ordinata nel punto di origine della densità spettrale di potenza. Ponendo il marker dell’analizzatore di spettro a 100Hz, abbiamo che SF (100)=-64,83dBc. E’ sufficiente una misurazione a 100Hz in quanto tra zero 0-100Hz lo spettro è abbastanza piatto, quindi non prendiamo la misura troppo vicino alla portante per evitare errori di misurazione da parte dello strumento stesso. Dal grafico di figura 8.1 otteniamo K=3.29E-7 rad2/hz, e dalla misura della varianza del rumore di fase 18mrad trovo:
![]()
Determiniamo lo spettro lorenziano per vedere quanto possa essere attendibile questo risultato.
![]() è
è ![]()
L’equazione dello spettro lorenziano risulta:
![]()
che confrontato con quello ricavato al capitolo 8:
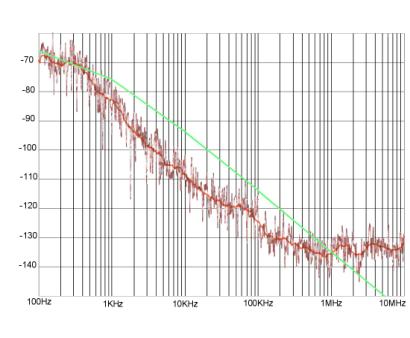
fig. 9.1 Confronto tra lo spettro lorenziano e quello del
rumore di fase
Notiamo come il risultato possa essere
abbastanza attendibile, anche se sovrastima l’uscita effettiva (lo si può
intuire dal grafico). Purtroppo
quello che vediamo immediatamente è come le variabili aleatorie di rumore siano
molto correlate. Infatti il tempo di coerenza è pari a![]() , mentre il nostro ritardo è di soli 146ns, quindi un
coefficiente di correlazione è circa 0.9997.
, mentre il nostro ritardo è di soli 146ns, quindi un
coefficiente di correlazione è circa 0.9997.
9.3 METODO DELLO
SPETTRO DI FREQUENZA
Come visto nel paragrafo 4.4 per la riuscita di
questo metodo è determinante la scelta della Df. Infatti bisogna determinare con precisione il risultato di
questo integrale:

Per scegliere in modo opportuno la nostra Df, disegniamo la sinc2(tf) con t pari al nostro ritardo
146ns.

fig. 9.2 Grafico di sinc2(f*146e-9)
Possiamo vedere come fino a 400Khz si può considerare sinc2(tf)=1:

mentre per frequenze maggiori di 400Khz:

Siccome è impossibile raccogliere tutto il rumore,
in quanto anche il solo cavo ha una banda limitata, integriamo fino W=5Mhz
(banda del filtro LP che mettiamo all’uscita del mixer), poiché tutte le
frequenze maggiori verranno soppresse.
Quindi, scegliendo una Df=400kHz, possiamo considerare costante il tratto
di rumore di fase su cui integriamo , cioè rumore bianco pari a –133dBc ed
equivalente a 5E-14 rad2/hz
(si veda figura 8.1):

La tensione di uscita sarà:
![]()
Questo se avessimo un convertitore con banda 5Mhz. Ma per il nostro caso, cioè per il convertitore 100Hz-100kHz, dobbiamo scegliere una Df=100kHz senza sommare il secondo termine.
![]()
9.4 DETERMINAZIONE
DELLA sf
La soluzione ideale sarebbe stata quella di
determinare il rumore di frequenza con L’HP8561E e integrarlo, come abbiamo
fatto per il rumore di fase. Purtroppo non siamo riusciti ad acquisire tale
grafico. Perciò abbiamo preso i dati in ascii da 100Hz a 100Khz del rumore di
fase dei seguenti punti.
|
Frequenza (Hz) |
dBc |
|
100 |
-67 |
|
200 |
-65 |
|
300 |
-66 |
|
400 |
-67 |
|
500 |
-68 |
|
600 |
-72 |
|
700 |
-73 |
|
800 |
-75 |
|
900 |
-76 |
|
1000 |
-76.83 |
|
2000 |
-87 |
|
3000 |
-93 |
|
4000 |
-95 |
|
5000 |
-97 |
|
6000 |
-99 |
|
7000 |
-101.5 |
|
8000 |
-103 |
|
9000 |
-104 |
|
10000 |
-105 |
|
20000 |
-111 |
|
30000 |
-114 |
|
40000 |
-116 |
|
50000 |
-117 |
|
60000 |
-118 |
|
70000 |
-118.5 |
|
80000 |
-119 |
|
90000 |
-120.5 |
|
100000 |
-121 |
Tab 9.3
Punti acquisiti del rumore di fase
Dopo di che abbiamo scritto un programma in delphi
che operasse una interpolazione dei seguenti punti e potesse calcolare sf2 . Con questo programma abbiamo ottenuto per il rumore di fase
una sf=16.3mrad che confrontata con quella ricavata dall’HP8561E (18mrad) è
abbastanza vicina. Per la frequenza abbiamo ricavato: sf=32.53Hz.
![]()
10 POSSIBILI ALTERNATIVE
Sicuramente la causa principale della tensione così bassa è da imputare all’alto grado di correlazione, cioè al cavo troppo corto, ma anche al tipologia del mixer, il quale restituisce una tensione di uscita bassa.
Possiamo individuare un altro schema che potrebbe avere maggior successo. Ovviamente bisogna considerare il rapporto benefici-costi e la difficoltà realizzativa.
10.1 SCHEMA

Questo schema rappresenta nient’altro che un
demodulatore di fase vero e proprio.
Certamente la difficoltà realizzativa è maggiore a causa del fatto che bisogna impiegare elementi
a bassissimo rumore; si riesce però ad eliminare completamente il problema della
correlazione. Non solo, ma in questo modo abbiamo anche a disposizione, prima
dell’integratore, il rumore di frequenza.
L’hard limiter può rendersi necessario per eliminare
il rumore di ampiezza, essendo presente successivamente un derivatore molto sensibile
al rumore.
Supponiamo di avere in ingresso il solito:
![]()
All’uscita del derivatore abbiamo:
![]()
All’uscita
del Dc block avremo ![]() , cioè il rumore di frequenza, che, se integrato, porta al
rumore di fase. Paradossalmente
non ci sono problemi di frequenza, infatti possiamo lavorare anche a frequenze
intorno al centinaio di kilohertz. Non siamo quindi costretti ad operare, come
in precedenza, intorno a 50Mhz. Per un oscillatore con un range da 200Khz a
1Ghz lavorare intorno ai 300Khz significa avere molto rumore. I problemi più
importanti da risolvere sono quelli di realizzare un circuito a basso rumore,
un ottimo rivelatore di inviluppo in grado inseguire il rumore di frequenza e
risolvere il problema della elevata tensione in uscita dal derivatore, che può
saturare l’elettronica.
, cioè il rumore di frequenza, che, se integrato, porta al
rumore di fase. Paradossalmente
non ci sono problemi di frequenza, infatti possiamo lavorare anche a frequenze
intorno al centinaio di kilohertz. Non siamo quindi costretti ad operare, come
in precedenza, intorno a 50Mhz. Per un oscillatore con un range da 200Khz a
1Ghz lavorare intorno ai 300Khz significa avere molto rumore. I problemi più
importanti da risolvere sono quelli di realizzare un circuito a basso rumore,
un ottimo rivelatore di inviluppo in grado inseguire il rumore di frequenza e
risolvere il problema della elevata tensione in uscita dal derivatore, che può
saturare l’elettronica.