Introduzione.
In
diverse occasioni ho dovuto rinunciare a realizzare dei progetti di mio
interesse, solo perché non disponevo di strumentazione adeguata per misurare
frequenze subsoniche . Per valori così bassi infatti
il frequenzimetro consente in genere risoluzioni di +/- 1Hz. Per
spingersi oltre occorre utilizzare il periodimetro che come dice la stessa
parola, effettuando la misura del periodo di un segnale, ci restituisce dei
valori più precisi con risoluzioni di frazioni di Hz.
Come é noto conoscendo il valore del periodo di un segnale, possiamo subito risalire alla frequenza con l'altrettanto nota formula F = 1 / T , dove F é la frequenza espressa in Hz. e T é il periodo espresso in secondi. Non volendo andare incontro a grosse spese ho pensato di realizzare un periodimetro, avvalendomi delle potenzialità offerte da uno dei più diffusi microcontrollori, il PIC-16F84A prodotto dalla Microchip. Attorno a tale chip che costituisce il cuore di tutto il sistema, gravitano pochi altri componenti; questo grazie al fatto che al suo interno possiamo sfruttare vari registri di controllo e di configurazione, nonché due banchi di memoria EEPROM e RAM di piccole capacità ma sufficienti al nostro scopo.
Non lasciatevi impressionare quindi dalla
ridotta complessità circuitale. Infatti dal confronto effettuato
con apparati di tipo professionale ho accertato le ottime caratteristiche
finali del progetto. Prima fra tutte ho riscontrato una elevata precisione,
soprattutto per valori superiori a 1 mS. ovvero per frequenze minori di 1000 Hz,
con una risoluzione di 1 uS;
poi abbiamo buona sensibilità, basso costo, basso assorbimento di corrente e
complessità circuitale ridotta al minimo. E’ per questi motivi che desidero
proporlo a tutti coloro che hanno avuto la mia stessa esigenza o che vogliono
fare questa esperienza .
Principio
di funzionamento.
In pratica per ottenere misure attendibili , il segnale da misurare in ingresso non deve scendere sotto il livello di 70 mV. Il transistor T1 ad accoppiamento in continua , provvede ad amplificare tale segnale rendendolo idoneo a pilotare la porta d' ingresso PB0 del PIC, che essendo del tipo triggerato accetta anche segnali sinusoidali. Di tutto il resto, e cioé dalla elaborazione del segnale fino alla visualizzazione del dato, se ne occupa la logica di funzionamento implementata dal software che é molto semplice. Al sopraggiungere di un fronte di salita del segnale in ingresso, scatta un interrupt interno che istantaneamente obbliga il PIC ad abbandonare l’ esecuzione del programma principale, passando ad eseguire una subroutine che avvia un preciso contatore interno incrementato da un clock da 1 Mhz.
Tale clock è derivato dal quarzo Q1 da 8 Mhz, conferendo al sistema una risoluzione sul display di 1uS. Al successivo fronte di salita, viene visualizzato sul display il valore conteggiato dal contatore interno che subito dopo viene azzerato ed avviato al conteggio successivo. Come si evince anche dalla fig.1, in questo modo il display viene continuamente aggiornato col valore conteggiato che si riferisce al tempo intercorso tra due fronti di salita, cioé al periodo.
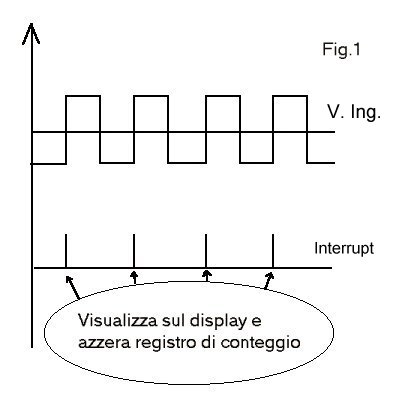 |
In
definitiva ogni fronte di salita funge allo stesso tempo da stop per il
conteggio precedente e da start per il conteggio successivo. Tenete presente che
non ho ritenuto opportuno predisporre lo strumento per misure superiori a 16
Sec., per cui dopo tale valore il registro di conteggio interno viene
automaticamente azzerato e fatto ripartire daccapo. Inoltre per misure di
periodo minori di 1 mS. ovvero per frequenze superiori a 1000 Hz. lo strumento
in questione non é più tanto preciso, per cui per
tali valori é preferibile usare il frequenzimetro. Va da se che maggiore sarà
il valore del periodo misurato, minore
sarà l' errore in cui possiamo incappare.
|
Collaudo.
Nel circuito non ci sono punti di taratura, per cui dopo aver attentamente controllato che non vi siano errori di montaggio, date pure alimentazione ed iniettate all' ingresso un segnale di 50 Hz. misurato anche da un frequenzimetro. A questo punto dovreste leggere sul display il valore del periodo pari a 20.00 mS. Se leggerete invece 19.99 mS. oppure 20.01 mS. , non preoccupatevi é il vostro frequenzimetro che non riesce a discriminare la differenza. Per tali valori infatti la frequenza esatta , nel primo caso sarà pari a : F=1/19.99*10^-3 = 1000/19.99 = 50.025 Hz. e nel secondo caso sarà pari a : F=1/20.01*10^-3 = 1000/20.01 = 49.975 Hz. per cui ritoccate la sintonia del vostro generatore fino a leggere 20.00 mS. e sarete veramente sicuri che il segnale da voi misurato é di 50 Hz. precisi . Volutamente per i calcoli appena effettuati, non ho tenuto conto delle unità, cosa che invece sarebbe opportuno fare per valori di lettura più bassi.
Conclusioni.
Per
il visualizzatore, ovviamente andrà bene qualunque tipo di display
intelligente, purché gestito da HD44780, che come si vede dallo schema
elettrico, viene pilotato solo in scrittura e solo coi quattro bit più
significativi.
Questo
strumento vi consentirà di misurare con estrema precisione, la velocità di
rotazione di un alternatore, la frequenza di rete, la frequenza dei toni
subaudio ed altro ancora. Se ad esempio prelevate il segnale da un sensore
ottico, potrete agevolmente misurare la velocità di rotazione di una ruota, di
un albero motore, oppure le
oscillazioni di un pendolo .
Il
software da me prodotto é a disposizione di tutti, per averlo basta contattarmi
direttamente al mio indirizzo e-mail; dove mi farebbe piacere ricevere anche le
vostre osservazioni, valutazioni, richieste, suggerimenti, critiche e
quant'altro riterrete opportuno, al fine di migliorare il progetto. Salutandovi,
auguro a tutti buon lavoro e buon divertimento.