INDICE
|
|
|
8.1 Problemi e Algoritmi |
|
8.1.1. Introduzione
intuitiva del concetto di problema |
|
8.1.2. Cenni sulle
strategie per la risoluzione dei problemi |
|
8.1.3. Soluzione di un
problema |
|
8.1.4.
Gli algoritmi |
|
8.1.4a I Diagrammi a
Blocchi |
|
8.1.4b Esempi di algoritmi
rappresentati mediante diagrammi a blocchi |
|
8.1.4c
Il Linguaggio di progetto |
|
8.1.4d Esempi di algoritmi
rappresentati mediante Linguaggio di progetto |
|
8.2 Automi Esecutori |
|
8.2.1. Caratteristiche di un automa e meccanizzazione
della soluzione di un problema |
|
8.2.1a Il concetto di
sistema |
|
8.2.1b Il concetto di
modello |
|
8.2.1c Il concetto di
automa |
|
8.2.1d Esempi di automi a
stati finiti |
|
8.2.2. Automi e classi di
problemi |
|
8.3 Linguaggi |
|
8.3.1. Sintassi e semantica
dei linguaggi formali |
|
8.3.1a I linguaggi nella
comunicazione uomo-macchina |
|
8.3.2.
Linguaggi e automi |
|
8.3.2a Rassegna dei principali software |
|
8.3.3. Introduzione ai
linguaggi di programmazione |
|
|
|
8.3.4. Rassegna sui
Principali Linguaggi |
|
Approfondimento
1 - Aggregazione di sottosistemi |
|
Approfondimento 2 – La
macchina di Turing |
|
Approfondimento 3 –
Categorie dei linguaggi evoluti |
|
Approfondimento 4 – Le
istruzioni di controllo |
|
Indice delle Figure |
|
BIBLIOGRAFIA |
8.1 Problemi e Algoritmi
Obiettivi (estratto dalla C.M. n.55 del 21-5-2002):
·
Riconoscere e
analizzare una situazione problematica.
·
Conoscere alcuni
dei procedimenti di riduzione di problemi complessi a sottoproblemi.
·
Riconoscere le
caratteristiche che una procedura risolutiva deve possedere.
·
Rappresentare una
procedura rigorosa e generale di soluzione di un problema.
8.1.1 Introduzione intuitiva del
concetto di problema
Col termine problema o situazione problematica
s’indica una situazione che pone delle
domande cui si devono dare risposte. Risolvere
il problema vuol dire uscire da tale situazione.
Un
problema consta dei seguenti elementi:
·
I dati, ossia ciò che è noto, l’istanza
che si deve affrontare e che possiamo indicare col termine input.
·
I risultati, ossia ciò che si deve
determinare, gli elementi incogniti la cui determinazione fornisce l’output.
·
Le condizioni, che sono in generale le
limitazioni cui devono soggiacere i risultati.
La formulazione del problema determina la strategia
risolutiva migliore da adottare per risolverlo.
Per cogliere il
collegamento tra la struttura di un problema ed i metodi risolutivi per esso adottati, è opportuno tenere conto della seguente ripartizione dei vari
tipi di problemi in classi:
·
Problemi di decisione, in cui l’output è fornito dal valore vero o falso a
seconda che l’input soddisfi o meno una determinata proprietà.
·
Problemi di ricerca, in cui, nello spazio delle
soluzioni possibili (spazio di
ricerca), si vuole determinare quella soluzione che soddisfa le condizioni
poste dal problema, che viene detta soluzione
ammissibile.
·
Problemi di ottimizzazione, in cui alle soluzioni ammissibili è associata una
misura e si deve determinare la soluzione ammissibile la cui misura è massima o
minima.
8.1.2. Cenni sulle strategie per la
risoluzione dei problemi
Il primo passo da compiere è analizzare il problema
col quale si ha a che fare.
Per compiere l’analisi
di un problema il risolutore deve:
•interpretare l’enunciato
del problema e definire gli obiettivi da realizzare;
•individuare i
dati del problema e costruire un modello
opportuno (modello è una rappresentazione della realtà privata degli aspetti superflui
alla soluzione del problema);
•descrivere il
procedimento risolutivo individuando le operazioni da compiere sui dati
iniziali per ottenere i risultati finali;
•eseguire nell’ordine
le operazioni descritte nel processo risolutivo (il risolutore in questa fase è
detto esecutore);
•verificare
se i risultati ottenuti rispondono alle finalità del problema reale
(attendibilità).
Le fasi sopraelencate sono riassunte dallo schema che
segue.
Fig.1 Analisi di un
problema

La
prima fase dell’analisi di un problema, ossia la definizione dell’obiettivo da
raggiungere, può essere realizzata attraverso processi di affinamento sempre
più dettagliati. Si tratta di scomporre un problema complesso in sottoproblemi più semplici, utilizzando
la tecnica del top-down:
·
il problema viene esaminato nelle direttrici
generali;
·
scomposto in
sottoproblemi;
·
di ciascun
sottoproblema si determinano le operazioni specifiche;
·
esso viene
scomposto in ulteriori sotto-sottoproblemi, fino a giungere alle operazioni
elementari.
La
strategia risolutiva sopra descritta è illustrata dallo schema seguente:
Fig. 2 Tecnica del top-down

8.1.3. Soluzione di un problema
Non esistono metodi
precisi che possano essere indicati per risolvere un problema, in quanto
ogni problema va affrontato nella propria specificità e la sua soluzione dipende dalle conoscenze
che si possiedono intorno a quel problema ed alle tecniche per risolverlo.
Compiuto il primo passo, quello dell’analisi del problema,
si può far scaturire da essa una descrizione discorsiva del problema e delle
varie fasi del processo risolutivo individuato.
L’esplicitazione di tale descrizione può avvenire
mediante la formalizzazione dei passi elementari da effettuare, che può essere
realizzata tramite una Pseudocodifica (Notazione Lineare Strutturata) o mediante la tecnica del Diagramma a Blocchi.
8.1.4. Gli
algoritmi
Si
dice algoritmo un
insieme di istruzioni che definiscono una sequenza di operazioni mediante le
quali si risolvono tutti i problemi di una determinata classe.
L’algoritmo deve essere:
•finito,
costituito cioè da un numero limitato di passi (le istruzioni sono in numero
finito e vengono eseguite un numero finito di volte);
•definito,
ogni istruzione deve consentire un’interpretazione univoca;
•eseguibile,
cioè la sua esecuzione deve essere possibile con gli strumenti di cui si
dispone;
•deterministico,
ad ogni passo deve essere definita una ed una sola operazione successiva.
Le caratteristiche sopraelencate
caratterizzano un processo
automatizzabile, che esclude la componente intuitiva propria
dell’elaborazione governata dall’uomo.
Le istruzioni devono essere espresse
informa comprensibile all’esecutore (cioè interpretabili dal sistema di
elaborazione) e devono descrivere le azioni da compiere al livello di dettaglio
delle capacità elementari dell’esecutore.
Per facilitare la stesura dell’algoritmo si ricorre a
rappresentazioni grafiche e
formalizzate, quali ad esempio i Diagrammi
a Blocchi o il Linguaggio di
progetto.
8.1.4.a I Diagrammi a Blocchi
Tra le tecniche utilizzate per rappresentare in maniera chiara e sintetica
la struttura degli algoritmi, quella del Diagramma a Blocchi , anche detto flow-chart, ha il pregio di evidenziare
visivamente l’avanzamento in sequenza e le varie strutture che compongono
l’algoritmo.
Questa tecnica si basa sull’osservazione che le
istruzioni di un qualunque algoritmo sono di uno dei seguenti tipi:
·
istruzioni di calcolo o di elaborazione, che descrivono un’azione da compiere necessariamente
dopo la precedente e prima della seguente nell’elenco ordinato;
·
condizioni
che pongono una domanda cui si può rispondere sì/no oppure vero/falso e che, a
seconda della risposta, indicano due diverse azioni da compiere.
Le due tipologie di istruzioni vengono rappresentate
convenzionalmente con le forme geometriche rettangolo e rombo, la logica di
sequenza viene data da frecce che congiungono i vari blocchi nel senso di
avanzamento dell’esecuzione.
Per le istruzioni di input e di output si usa un
parallelogramma, per identificare l’inizio e la fine della sequenza di
istruzioni si usa l’ellisse, la necessità di mutare la sequenza d’esecuzione
passando ad un’istruzione che non sia quella immediatamente successiva
(istruzioni di salto) è resa graficamente mediante le frecce.
Per meglio chiarire l’uso di questa tecnica di
rappresentazione si vedano gli esempi
di diagrammi a blocchi.
8.1.4.b Esempi di algoritmi rappresentati mediante
diagrammi a blocchi
ALGORITMO 1 - Somma di
una sequenza di numeri
Indicando con ai
il generico elemento da sommare, la formula matematica generale è
S = a1+ a2 +…+ an . Bisogna fornire in input
all’elaboratore i singoli valori ai ed il numero n di tali valori.
L’algoritmo utilizza una struttura
iterativa, ossia un blocco d’istruzioni viene ripetuto un numero finito di
volte.
Utilizzeremo una variabile N per l’input di n e per
contare quante volte si deve ripetere l’iterazione; il valore di N si
decrementa di un’unità nell’ambito dell’iterazione e l’iterazione termina
quando N raggiunge il valore zero. La variabile
A è usata per gli input degli ai, S per le somme parziali e
totale.
Fig. 3 Algoritmo 1 –
Diagramma a blocchi

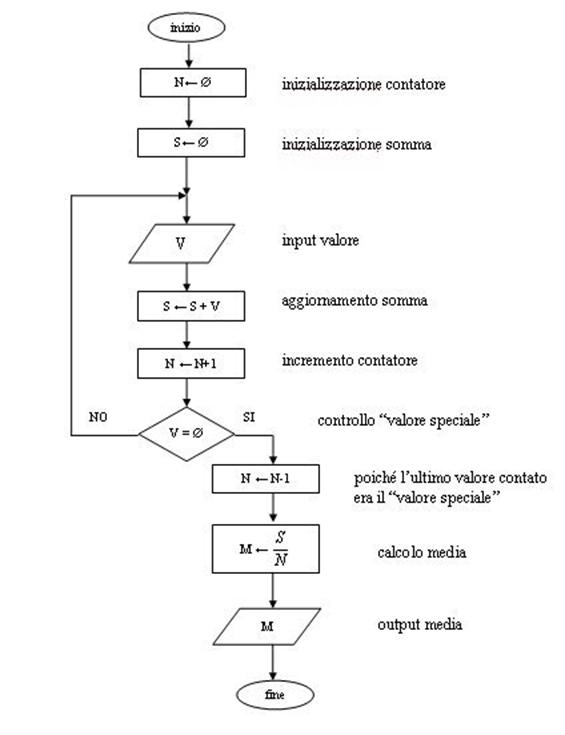
ALGORITMO 2 – Calcolo della media aritmetica di una sequenza di
valori numerici
La formula matematica è M = ![]() .
.
Si consente all’utente di introdurre un numero
qualsiasi di dati, utilizzando un valore speciale (lo zero) per indicare la
fine della sequenza di input; l’algoritmo conta quanti elementi vengono
introdotti.
Fig.4 Algoritmo 2 – Diagramma a blocchi
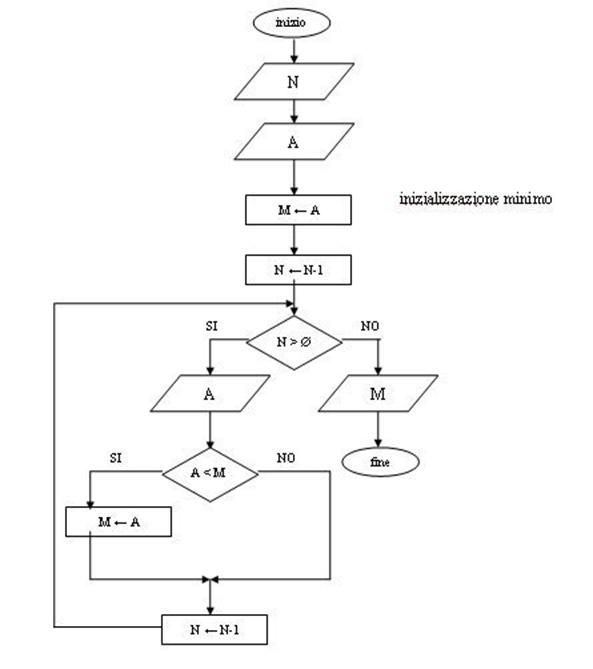
ALGORITMO 3 – Ricerca del minimo di una sequenza di valori
numerici
Indicati con ai i valori sui quali si deve
effettuare la ricerca, si può risolvere il problema con un algoritmo iterativo
che effettua confronti successivi: M1=min(a1,a2);
M2=min(M1,a3); M3=min(M2,a4);…;
Mn-1=min(Mn-2, an). Al termine degli n-1
confronti, Mn-1 coincide col
minimo cercato. La variabile A è usata
per gli input degli ai . N è il contatore delle iterazioni.
Fig. 5 Algoritmo 3 –
Diagramma a blocchi
Esercizio
proposto: in modo analogo, realizzare
il diagramma per l’algoritmo di ricerca del massimo di una sequenza di valori.
ALGORITMO 4 – Ordinamento per scambio di una sequenza di numeri
in modo crescente
Indicati con ai i valori da ordinare, deve risultare a1≤a2≤a3≤…≤an-1≤an
. Si può sfruttare l’algoritmo per la ricerca del minimo, utilizzando un
vettore per memorizzare gli n valori numerici da ordinare. Si inizierà
applicando l’algoritmo di ricerca del minimo su tutti gli elementi del vettore
e spostando il minimo in prima posizione, si procederà analogamente sui
rimanenti n-1 elementi e il minimo tra essi si sposterà in seconda posizione,
poi si ripeterà la procedura sui restanti n-2 elementi del vettore e così via.
Il diagramma a blocchi illustra l’algoritmo in questione, supponendo di avere
già a disposizione il vettore V(i) con i suoi n valori.
Fig. 6 Algoritmo 4 –
Diagramma a blocchi

Esercizio
proposto: in modo analogo, realizzare
il diagramma per l’algoritmo di ordinamento per scambio di una sequenza di
numeri in modo decrescente.
8.1.4.c Il Linguaggio di progetto
Un algoritmo può essere rappresentato anche mediante
un linguaggio speciale che descrive le istruzioni e la logica di avanzamento
dell’esecuzione con frasi anziché con un diagramma. Si parla in tal caso di pseudocodifica o notazione lineare strutturata.
Tale linguaggio
formale, detto linguaggio di progetto, assomiglia al linguaggio naturale, ma è privo
di ambiguità e segue regole prive di eccezioni. Esso utilizza parole riservate, spesso tratte dalla
lingua inglese, mediante le quali vengono espressi i diversi tipi di
istruzioni.
Gli esempi mostrano
l’utilizzo di questa tecnica, in particolare mediante la codifica in linguaggio
pseudopascal, cosiddetto perché simile al linguaggio di programmazione Pascal.
8.1.4.d Esempi di algoritmi rappresentati mediante
Linguaggio di progetto
ALGORITMO 1 - Somma di una sequenza di
numeri
Riguardo
i dettagli dell’algoritmo si rimanda a quanto detto nella sua codifica mediante diagramma a blocchi.
Pseudocodifica algoritmo 1:

ALGORITMO 2 – Calcolo della media
aritmetica di una sequenza di valori numerici
Riguardo
i dettagli dell’algoritmo si rimanda a quanto detto nella sua codifica mediante diagramma a blocchi.
Pseudocodifica algoritmo 2:

ALGORITMO 3 – Ricerca del minimo di una
sequenza di valori numerici
Riguardo
i dettagli dell’algoritmo si rimanda a quanto detto nella sua codifica mediante diagramma a blocchi.
Pseudocodifica algoritmo3:

ALGORITMO 4
– Ordinamento per scambio di una sequenza di numeri in modo crescente
Riguardo
i dettagli dell’algoritmo si rimanda a quanto detto nella sua codifica mediante diagramma a blocchi.
Pseudocodifica algoritmo 4:

8.2 Automi Esecutori
Obiettivi (estratto dalla C.M. n.55 del 21-5-2002):
·
Essere in grado
di costruire una procedura risolutiva di un problema sfruttando opportunamente
le peculiarità dell’esecutore.
·
Comprendere la
rilevanza le caratteristiche di base di un automa per la soluzione di classi di
problemi.
8.2.1.
Caratteristiche di un automa e meccanizzazione della
soluzione di un problema
La
risoluzione di un problema è un processo di manipolazione di informazioni
finalizzato a generare nuove
informazioni.
Per informazione
intendiamo un elemento di conoscenza
significativa, che può essere utilizzata immediatamente oppure conservata
per un utilizzo futuro.
Le attività cui si dà luogo per risolvere il problema
possono essere distinte in:
·
attività “intelligenti“ di elaborazione
·
attività
“routinarie” di esecuzione
Mentre il primo ruolo è riservato alla mente umana, il
ruolo routinario viene delegato a strumenti capaci di svolgere in modo rapido
ed esatto le operazioni logico-matematiche.
Tali strumenti sono macchine, dette automi,
che compiono attività complesse in cui sono riconoscibili elementi
propri delle attività superiori del comportamento umano. Queste macchine
possono essere programmate per svolgere diverse mansioni e per modificare le
proprie azioni in relazione ai mutamenti ambientali.
8.2.1.a Il concetto di sistema
Si dice sistema un insieme di elementi che
interagiscono tra loro in modo da formare una unità ch,e al verificarsi di un
dato evento (azione) proveniente dall’ambiente esterno (ecosistema), produce una risposta definita.
La risposta del sistema (output) agli input esterni
dipende anche dallo stato in cui il sistema si trova in quell’istante. Un
sistema è dotato di memoria, la sua storia è conservata nel suo stato.
Fig. 7 Rappresentazione schematica di un sistema:

Esempio: un ascensore che si trovi al piano terra, quando
l’utente preme il pulsante 2 sale di due piani; se l’utente preme ancora il
pulsante 2 una volta arrivato al secondo piano, l’ascensore non si muove. Il
sistema ha prodotto uscite diverse in quanto si trovava in stati diversi.
Al suo interno, gli elementi detti sottosistemi, si comportano
analogamente, ricevendo ingressi e fornendo uscite (risultati parziali rispetto
allo scopo globale del sistema).
Fig. 8 Sistema e
sottosistemi

8.2.1.b
Il concetto di modello
Nella rappresentazione dei sistemi si devono
descrivere gli input, gli output e i
processi avviati dagli input. Tale
rappresentazione di un sistema o di un processo deve permetterne lo studio
senza realizzarlo fisicamente.
Un modello è uno schema teorico elaborato
in molte discipline per rappresentare gli elementi fondamentali di fenomeni o
enti.
In base all’uso i modelli vengono detti:
·
modelli descrittivi o statici: riproducono con eventuali semplificazioni la realtà,
senza presupporre l’uso che ne verrà fatto
·
modelli predittivi: danno gli elementi di una certa realtà necessari per prevederne
l’evoluzione, lasciando spazio ad eventuali scelte
·
modelli prescrittivi: impongono un particolare comportamento in previsione
dell’obiettivo da raggiungere
·
modelli simbolici o matematici: danno una rappresentazione astratta della realtà cui
si riferiscono, mediante un insieme di equazioni e/o disequazioni che legano le
grandezze coinvolte
·
modelli analogici: danno una rappresentazione fedele della realtà, tipici sono i modelli in scala ridotta, che
riproducono qualitativamente un sistema pur riducendone proporzionalmente la
dimensione
L’avvento degli elaboratori veloci ha reso possibile
lo studio di sistemi complessi (sistemi sociali, sistemi di produzione,sistemi
fisici ,…) effettuando in laboratorio esperimenti controllati attraverso gli
elaboratori elettronici.
8.2.1.c Il concetto di automa
Un automa è
un sistema dinamico, invariante, discreto nell’avanzamento e nelle interazioni.
·
dinamico:
evolve nel tempo passando da uno stato all’altro in funzione dei segnali
d’ingresso e dello stato precedente;
·
invariante:
a parità di condizioni iniziali il comportamento del sistema è sempre lo
stesso;
·
discreto: le
variabili d’ingresso, di stato, d’uscita, possono assumere solo valori
discreti.
In termini formali,
si definisce automa a stati
finiti un sistema A = {I, U, S, f, g
}, dove
·
I = {i1,
i2, …in} insieme
finito dei possibili ingressi
·
U = {u1,
u2, …, um} insieme finito di possibili uscite
·
S = {s1,
s2, …, sh} insieme
finito di stati
·
![]() f = I × S U funzione delle uscite, che collega
l’uscita al valore attuale dell’ingresso e dello stato, ut=f (st,
it)
f = I × S U funzione delle uscite, che collega
l’uscita al valore attuale dell’ingresso e dello stato, ut=f (st,
it)
·
![]() g = I ×S S
funzione di transizione degli stati interni successivi, che collega lo stato
nell’istante successivo al valore attuale dell’ingresso e dello stato, st+1=g(st,
it)
g = I ×S S
funzione di transizione degli stati interni successivi, che collega lo stato
nell’istante successivo al valore attuale dell’ingresso e dello stato, st+1=g(st,
it)
L’espressione a
stati finiti accanto al termine
automa distingue quegli automi in cui anche l’insieme S è finito, mentre I ed U
lo sono sempre.
Le funzioni f (delle uscite) e g (di transizione dello
stato successivo) possono essere rappresentate mediante:
1.
Tabelle di transizione, tabelle a doppia entrata in cui il numero delle
righe è pari al numero degli stati e quello delle colonne è pari al numero
degli ingressi.
2.
Grafi di transizione, costituiti da cerchi (nodi) in numero pari agli stati, da ciascuno
dei quali partono tanti archi quanti sono gli ingressi. Se le uscite sono
riportate sugli archi sotto gli ingressi si dice automa di Mealy, se le uscite sono riportate all’interno dei nodi
sotto lo stato si dice automa di Moore.
8.2.1.d Esempi di automi a stati finiti
Ascensore
Un ascensore di un palazzo a due piani accetta la
richiesta del piano di destinazione (terra, 1, 2) e restituisce lo spostamento
desiderato (su, giù, fermo). Si tratta di un automa in cui S={Pt, 1P, 2P}, Pt=
p. terra, 1P= p. primo, 2P= p. secondo; I={T, 1, 2} possibilità offerte dalla
pulsantiera; U={Su, Giù, Fermo} spostamenti dell’ascensore.
Tab.1 Tabella di transizione relativa
all’automa dell’esempio:

Fig. 9 Grafo di Moore relativo
all’automa dell’esempio

Gettoniera
Una gettoniera, dopo l’immissione
successiva di due monete, emette un gettone.
L’insieme degli ingressi è I =
{m,0}, dove m rappresenta la moneta e 0
indica che non è stata introdotta alcuna moneta.
L’insieme delle uscite è U =
{0,g}, dove 0 è nessuna risposta perché la macchina, ricevuta la prima moneta,
è in attesa della seconda o non ha ricevuto monete, g rappresenta un gettone.
L’insieme degli stati è S = { s1,s2},
dove s1 è lo stato iniziale, quando la gettoniera è in attesa della
prima moneta, s2 è lo stato di attesa della seconda moneta.
Tab.2 Matrice degli stati: ad ogni coppia
ingresso-stato presente associa lo stato successivo assunto dalla macchina

Tab.3 Matrice delle uscite: ad ogni
coppia ingresso-stato presente associa una risposta in uscita

Sistema
di regolazione di un orologio digitale
L'orologio è munito di tre
pulsanti P1, P2, P3. P1 serve per
passare dallo stato in cui il display mostra ore-minuti agli stati di
regolazione, P2 serve per incrementare il valore attualmente presente sul
display (inc=incrementa), il tasto P3 è un tasto bistabile tra le modalità del
display ore-minuti e mese-giorno.
Fig. 10 Grafo dell’orologio digitale

Automa che riconosce un
identificatore
Un
identificatore è costituito da una lettera seguita da altre lettere o cifre.
L’insieme
degli ingressi è I={LETTERA, CIFRA}, quello delle uscite è U={IDENTIFICATORE,
NON IDENTIFICATORE}, l’insieme degli stati è S={A, X }. A è lo stato iniziale
di attesa dell’inserimento del primo carattere (lettera o cifra), X è lo stato
finale cui s’arriva se la stringa d’ingresso è un identificatore. Se il primo
carattere introdotto non è una lettera, l’automa resta nello stato A, che
corrisponde all’uscita NON IDENTIFICATORE, lo stato finale X corrisponde
all’uscita IDENTIFICATORE.
Fig.
11 Grafo dell’automa che riconosce
un identificatore

Automa che riconosce
identificatori e numeri interi
Un
identificatore è costituito da una lettera seguita da altre lettere o cifre. Un
numero intero è una sequenza di cifre.
L’insieme
degli ingressi è I={LETTERA, CIFRA}, quello delle uscite è U={IDENTIFICATORE,
NUMERO, NE’ IDENTIFICATORE NE’ NUMERO}, l’insieme degli stati è S={A, X, Y }. A
è lo stato iniziale di attesa dell’inserimento del primo carattere (lettera o
cifra). Lo stato finale X è quello a cui si arriva se la stringa di ingresso è
un identificatore. Lo stato Y corrisponde invece ai numeri interi.
Fig.
12 Grafo dell’automa che riconosce
identificatori e numeri interi

8.2.2 Automi e classi di problemi
Molte macchine che usiamo quotidianamente sono automi:
la lavatrice, la lavastoviglie, l’impastatrice, i sistemi di controllo degli
ascensori, i distributori automatici di bevande, i distributori automatici di
benzina, i bancomat.
In ambito più specialistico ci sono
automi riconoscitori di sequenze,
automi analizzatori di linguaggio, automi decodificatori, automi traduttori.
I computer sono automi, particolari automi a
programma, possono cioè svolgere il ruolo di un automa o di un altro
dipendentemente dal programma che si manda in esecuzione.
L’uso di automi è uno strumento di astrazione molto
potente per individuare la soluzione di particolari classi problemi. Attraverso la rappresentazione del
grafo di un automa si analizza il suo
comportamento logico-funzionale senza la necessità di una sua realizzazione
fisica.
Si tratta di una tecnica adatta allo studio di quelle
categorie di sistemi che non necessitano del controllo umano, ma sono
“autonomi” nel procedere all’espletamento delle loro funzioni (sistemi
realizzati dall’uomo per compiere lavori specifici). L’uomo che li utilizza
interviene solo nel fornire i comandi in ingresso o nell’azionare pulsanti e,
senza interessarsi di cosa accade al loro interno, vede solo l’effettuazione
della funzione in uscita. I processi avviati dagli input sono deterministici,
univoci, previsti per qualunque caso in ingresso.
Un sistema
automatico è un sistema in cui la componente umana è completamente
eliminata nell’ambito dei processi, che sono ben determinati e prevedibili e
ogni richiesta in ingresso può attivare uno di tutti e soli i processi
eseguibili dal meccanismo interno.
Approfondimento:
La Macchina di Turing.
Un sistema umano,
al contrario, quale ad esempio un sistema aziendale, presenta un carattere
probabilistico poiché l’uomo può assolvere a funzioni anche impreviste, in
numero indeterminato, utilizzando ragionamento, ma anche creatività ed intuito.
8.3
Linguaggi
Obiettivi (estratto dalla C.M. n.55 del 21-5-2002):
·
Riconoscere gli
elementi che concorrono a definire un linguaggio (alfabeto, parola, grammatica,
...).
·
Riconoscere
l’estrema varietà di automi e relativi linguaggi contemporaneamente presenti in
un calcolatore: il microprocessore, il sistema operativo, il word processor, il
foglio di calcolo, ecc..
·
Riconoscere i
linguaggi di programmazione come interfaccia per codificare algoritmi.
·
Riconoscere le
strutture fondamentali dei linguaggi di programmazione.
8.3.1. Sintassi e semantica dei
linguaggi formali
Il linguaggio
consente la comunicazione, intesa
come scambio di informazioni (elementi
di conoscenza significativa).
Un’informazione
può:
·
essere acquisita
tramite rilevamento diretto di un evento reale, mediante percezione sensoriale;
·
essere trasmessa
intenzionalmente (messaggio) da un
emittente al ricevente per mezzo di un canale.
Nel secondo caso la
sorgente dell’informazione sceglie la rappresentazione più opportuna
dell’informazione, affinché il messaggio
sia compreso in modo univoco ed obiettivo. L’emittente è colui dal quale parte l’informazione, il mezzo che
trasporta l’informazione è detto canale.
Il ricevente è il destinatario
dell’informazione.
La funzione fondamentale del linguaggio è quella di
sostituire ad oggetti o concetti dei simboli. Ogni parola (significante) rappresenta un oggetto concreto, una persona, un ente
astratto (significato).
Distinguiamo tra:
·
linguaggi naturali, utilizzati nella comunicazione quotidiana tra gli esseri umani, privi
di una definizione rigorosa ed in continua evoluzione, spesso presentano
ambiguità ma hanno enorme potenza espressiva;
·
linguaggi formali, creati dall’uomo per scopi precisi, secondo regole convenzionali esplicite che non ammettono eccezioni e non
consentono sinonimi e omonimie. Il significato di una frase di tali linguaggi è
sempre privo di ambiguità, è sempre possibile determinarne la correttezza
(grammaticale), ma essi hanno potere espressivo limitato.
Il linguaggio è un sistema di segni, sistema in quanto i
vari elementi si cui è formato funzionano insieme in un tutto unitario. I segni
sono le parole (stringhe) del
linguaggio, che si usano per indicare l’associazione tra un dato percepibile ed
un concetto. Ogni parola (significante)
rappresenta un oggetto concreto, una persona, un ente astratto che la mente
umana associa al messaggio (significato).
Elementi di un linguaggio:
•alfabeto: insieme finito e non vuoto di
simboli convenzionali espressi con segni tipografici detti caratteri
•sintassi: insieme finito e non vuoto
delle regole mediante le quali si formano le stringhe o le frasi di un
linguaggio
•semantica: insieme finito e non vuoto
di significati da attribuire alle stringhe
•grammatica: insieme finito e non vuoto di
tutte le regole che servono per generare un linguaggio
8.3.1.a I linguaggi nella comunicazione
uomo-macchina
L’utilizzo di
un linguaggio formale consente di passare da
un algoritmo al corrispondente programma.
Si dice programma una sequenza di istruzioni
espresse in un linguaggio formale (linguaggio
di programmazione) mediante le quali si può risolvere un problema.
L’esecuzione di
un programma è un evento che trasforma dati in risultati.
Dal confronto tra la definizione di algoritmo data in precedenza e quella di programma,
risulta evidente che la differenza sta nel modo in cui le istruzioni sono
codificate.
Una prima distinzione può essere fatta tra:
1.
linguaggi non evoluti o di basso livello (linguaggio macchina, linguaggi assemblativi);
2.
linguaggi evoluti
o di alto livello (algoritmici,
speciali).
Ogni processore ha un proprio linguaggio, detto linguaggio
macchina, che ad ogni stringa di bit fa corrispondere una operazione
elementare. Questo tipo di linguaggio è molto lontano dal modo di ragionare
dell'uomo. Inizialmente l’attività di codifica di algoritmi, lavoro lungo e
difficile, era riservata solo a tecnici super specializzati. In seguito furono
creati dei linguaggi intermedi con cui scrivere i programmi. Per l’utilizzo di
un algoritmo codificato in questo modo è
necessario un apposito programma traduttore che converte il programma originale
(detto file sorgente) nelle
corrispondenti istruzioni in linguaggio macchina (ottenendo così il file oggetto). Il primo di tali
linguaggi fu il linguaggio Assembler,
in cui al posto di ogni istruzione
macchina viene usato un codice mnemonico ad esso associato. L'Assembler è
ancora molto vicino alla logica del processore.
Successivamente sono stati ideati linguaggi non più orientati
alla macchina, ma orientati alla
soluzione di problemi. Con tali linguaggi, indipendenti dal processore e
dalla particolare macchina, il lavoro del programmatore risulta semplificato.
Le istruzioni e i dati da esse manipolati vengono rappresentati simbolicamente
e viene delegato alla macchina il lavoro ripetitivo e deterministico della loro
traduzione in codifiche binarie.
8.3.2.
Linguaggi e automi
Per ottenere la soluzione di un problema, una volta
individuata la strategia risolutiva (algoritmo), si affida la messa in
atto delle operazioni che essa prevede
ad un esecutore (automa).
Un automa è costruito per uno scopo determinato, ed è
pertanto in grado di compiere il processo previsto per raggiungere l’obiettivo fissato,
compiendo un numero finito di operazioni
disposte, in reazione agli input che gli vengono forniti al momento
dell’attivazione.
Ciò comporta un processo di comunicazione tra
l’ideatore della strategia e il realizzatore della stessa, che è reso possibile
dall’uso di opportuni linguaggi (linguaggi di programmazione).
Ciascun linguaggio di programmazione è indicato per
una particolare classe di problemi, ossia per ogni campo di applicazione ci
sono i linguaggi più adatti.
Un elaboratore elettronico è un automa programmabile,
è possibile cioè comunicare con esso usando linguaggi diversi, ciascuno
finalizzato alla soluzione di una particolare classe di problemi. Nel
calcolatore sono pertanto presenti simultaneamente una grande varietà di
automi, ciascuno dei quali utilizza un opportuno linguaggio.
8.3.2a
Rassegna dei principali software
Il sistema
operativo, che è il software di base ossia l’applicazione che controlla
tutte le risorse del computer, necessita di un linguaggio il più possibile vicino
al linguaggio macchina ed estremamente potente anche se complesso , ossia l’Assembler. Le parti del sistema operativo
d’interfaccia con l’utente vengono generalmente scritte in C o C++.
Su un computer vengono comunemente installati
programmi base di Office Automation:
·
il word processor, per la realizzazione di testi scritti, che trasforma la macchina
in un automa che ha sostituito le vecchie macchine da scrivere, con potenzialità assai più numerose e
precise;
·
il foglio di calcolo, per il calcolo di
un’ampia gamma di funzioni, la realizzazione di tabelle per l’organizzazione e
l’analisi di dati, la creazione di grafici descrittivi di fenomeni di varia
natura (economici, statistici, fisici…);
·
sistemi per la gestione di basi di dati, per la realizzazione
di archivi di dati (insiemi organizzati di informazioni), la creazione
di tabelle e la realizzazione di procedure per l’inserimento, la modifica e la
consultazione dei dati archiviati secondo prefissati criteri;
·
programmi per la
realizzazione di presentazioni multimediali, utile supporto per l’attività d’insegnamento, per
l’esposizione di una relazione in ambito aziendale, per la presentazione di un
evento;
A questi possono essere aggiunti altri programmi secondo
le specifiche esigenze:
·
programmi di grafica computerizzata, per ottenere semplici disegni od anche immagini di precisione da utilizzare in ambito
professionale;
·
elaboratori digitali d’immagini e per la realizzazione
di animazioni, con i quali è
possibile ritoccare fotografie, realizzare fotomontaggi e immagini animate;
·
editor di suoni,
per la manipolazione e la realizzazione di file audio;
·
editor di pagine web, ossia di file in formato
HTML (HyperText Markup Language)
pubblicabili sulla Internet, così da
rendere i dati in essi contenuti consultabili direttamente con un programma di navigazione (browser).
Sono poi a disposizione per gli utenti una grande
varietà di applicazioni che risolvono i più svariati problemi nell’ambito della
gestione aziendale, dell’apprendimento, della ricerca scientifica.
8.3.3. Introduzione
ai linguaggi di programmazione
Lo schema seguente illustra i passaggi che conducono
dalla formulazione del problema alla sua soluzione.
Fig. 13 Dal problema
alla sua soluzione

Il passaggio dall’algoritmo risolutore di un problema
al corrispondente programma avviene mediante la codifica dell’algoritmo
attraverso un linguaggio di
programmazione.
I linguaggi di programmazione differiscono tra di loro
per la simbologia adottata per descrivere le operazioni e per le regole
sintattiche con cui si compongono le istruzioni.
Tutti i linguaggi riproducono una stessa serie di
operazioni e processi effettivamente eseguibili dell’elaboratore elettronico,
ossia utilizzano una stessa tipologia di istruzioni.
·
Istruzioni di dichiarazione, descrivono dati e variabili utilizzati dal
programma, definendone tipo e struttura. Quanto più è evoluto il linguaggio,
tanto più sono semplici le istruzioni per definire strutture complesse.
·
Istruzioni di assegnazione, consentono di assegnare ad una variabile un valore
dello stesso tipo della variabile.
·
Istruzioni di
controllo, sono istruzioni che
richiedono salti di sequenza nell’esecuzione del programma. Rientrano in questa
categoria le istruzioni di selezione e di iterazione e i salti incondizionati.
·
Istruzioni di input/output, richiedono l’ingresso di informazione da una periferica
alla memoria centrale oppure l’uscita di una informazione dalla memoria
centrale ad una periferica.
8.3.4. Rassegna sui Principali Linguaggi
FORTRAN (FORmula TRANslating system:
sistema traduttore di formule)
Ideato nei primi anni ’50 da John Backus, dipendente
IBM, per consentire a tecnici e scienziati di risolvere problemi matematici in
maniera automatica, senza ricorrere ai programmatori e con l’uso di una
simbologia affine a quella matematica. Ha subito successive evoluzioni ed è
utilizzato attualmente in ambito matematico.
ALGOL
(ALGOritmic Language: linguaggio algoritmico)
Nato alla fine degli anni ’50, è stato sviluppato da
Backus e Naur per applicazioni scientifiche. Importante caratteristica
innovativa è la strutturazione del programma in blocchi, delimitati da un begin iniziale e da un end finale, che sarà ripresa dalla
programmazione strutturata e dal linguaggio Pascal.
LISP (LISt
Processor: elaboratore di liste)
Linguaggio indirizzato alla manipolazione di
espressioni simboliche e di dati strutturati ad albero, che risale alla fine
degli anni ‘50. E’ applicato nella produzione di programmi traduttori, dato che
le regole sintattiche di questi vengono rappresentate secondo una struttura ad
albero.
COBOL
(COmmon Business Oriented Language: linguaggio orientato alle applicazioni
commerciali)
Ideato nel 1960 per sviluppare programmi per la
soluzione di problemi aziendali nei campi dell’amministrazione e del commercio
(fatturazione, contabilità, stipendi, organizzazione di dati, gestione di
file,…), ha subito successive evoluzioni ed è tuttora utilizzato.
BASIC
(Begginner’s All-purpose Symbolic Instruction Code: codice generale
d’istruzioni simboliche per principianti)
Nato all’inizio degli anni ’60, è un linguaggio
algoritmico di carattere generale non indirizzato ad alcuna applicazione
specifica e di facile apprendimento ed utilizzo. La sua semplicità e
versatilità ne ha determinata la rapida ed ampia diffusione e la realizzazione
di successivi aggiornamenti migliorativi. Da esso discendono i linguaggi
visuali orientati agli oggetti (visual BASIC), con interfaccia grafica di
facile utilizzo (pulsanti, finestre,…).
PL1
(Programming Language/1: linguaggio di programmazione/1)
Ideato nel 1965 per implementare programmi
appartenenti a diverse aree applicative, scientifiche e gestionali, riassume in
sé le caratteristiche dei precedenti FORTRAN, ALGOL e COBOL.
LOGO (dal
greco: pensiero, discorso)
Linguaggio adatto per l’apprendimento della logica
della programmazione da parte dei bambini, fu ideato nel 1967. Il programmatore
dispone di semplici comandi con i quali guida l’avanzamento di un cursore sullo
schermo e riscontra gli effetti grafici del programma prodotto.
PASCAL (così denominato in onore del matematico
francese Blaise Pascal)
Ideato da Niklus Wirth nel 1970, con l’intento di
realizzare un linguaggio che facilitasse l’insegnamento della scrittura di
programmi, ha trovato e trova tuttora ampia applicazione in ambito didattico.
Tale linguaggio consente un alto livello di strutturazione degli algoritmi e
dei dati ed offre la possibilità di definire tipi di dati diversi da quelli
standard.
C
(linguaggio di programmazione C)
La prima versione fu realizzata nel 1972 da Dennis
Ritchie e si distingueva dai suoi predecessori per il fatto di implementare una
vasta gamma di tipi di dato. E’ un linguaggio di alto livello che possiede un
numero ristretto di parole chiave e di costrutti di controllo e un gran numero
di operatori. Non possiede istruzioni di entrata/uscita né istruzioni per operazioni
matematiche, ma questa sua apparente
povertà di strumenti consente di realizzare qualsiasi programma in modo
semplice. E’ stato definito “il linguaggio di più basso livello tra i linguaggi
di alto livello”, perché è nato per lo sviluppo di sistemi operativi ossia
software di basso livello, ma è un linguaggio potente come un linguaggio
macchina e al tempo stesso di semplice utilizzo. Il sistema operativo UNIX è
scritto con questo linguaggio.
C++
Nel 1983 Bjarne Stroustrup inventò C++, che, partendo dal linguaggio C
del quale estende la sintassi, introduceva la programmazione Orientata agli
Oggetti (Object Oriented), un modo innovativo di progettare un programma che
rende il codice più semplice e riutilizzabile.
JAVA
Nato a metà degli anni ’90 ad opera della Sun
Microsystem, è un linguaggio di programmazione Object Oriented utilizzabile su
diverse piattaforme (Mac, PC, Unix e SGI) senza la necessità di modifiche o
ricompilazioni. Si tratta di un linguaggio multipiattaforma, per il quale il
compilatore non genera applicativi eseguibili dal computer, ma file che devono
essere interpretati dalla JVM (Java Virtual Machine, un microprocessore
virtuale) implementata sui vari sistemi. Ciò rende l’esecuzione di
un’applicazione Java più lenta dei programmi normali.
Le applicazioni JAVA,
eseguibili solo con la JVM, non
vanno confuse con le applet Java, che sono programmi che si eseguono
all’interno delle pagine web.
PHP
(Hypertext Pre-Processor)
Linguaggio di scripting, si utilizza per scrivere programmi che vengono interpretati
dal server su cui risiedono pagine web. Quando l’utente richiede una pagina web
contenente uno script PHP, il server richiama un modulo PHP che interpreta ed
esegue il codice, restituendo al server codice web semplice (HTML) che viene
passato al browser dell’utente. Tale procedimento consente di costruire
dinamicamente il contenuto della pagina web.
Approfondimento
1 – Aggregazione di sottosistemi
L’aggregazione
di sottosistemi in un unico sistema può avvenire attraverso:
·
Connessione a cascata:
l’uscita di un sottosistema costituisce l’ingresso dell’altro.

Fig14 Connessione
a cascata
·
Connessione in parallelo: i
due sottosistemi hanno lo stesso ingresso.

Fig. 15 Connessione in parallelo
·
Connessione in retroazione: le
uscite di uno influenzano gli ingressi dell’altro.

Fig. 16
Connessione in retroazione
Tale fenomeno di retroazione viene
anche indicato col nome di feedback.
Un sistema utilizza gli input per effettuare delle azioni che comportano degli
output. Una serie di azioni che concorrono al raggiungimento di un certo
risultato viene chiamata processo.
Si dice processo sequenziale
quando le singole azioni che lo compongono devono essere condotte in
sequenza.
Gli input di un sistema avviano processi mediante i
quali ottenere in uscita gli effetti a cui il sistema è stato finalizzato.
Un sistema è
quindi un’entità atta ad eseguire processi per conseguire fissati obiettivi.
Possiamo distinguere:
·
sistemi statici, che
non si evolvono nel tempo
·
sistemi dinamici,
che si evolvono nel tempo
Approfondimento 2 -
La Macchina di Turing.
In
sostanza il concetto di automa è quello di una
macchina capace di svolgere in maniera automatica, una volta sollecitata in
modo opportuno, delle operazioni particolari più o meno complesse che portano a
un preciso risultato.
Per
le loro caratteristiche, gli automi a stati finiti sono in grado di risolvere
solo quella tipologia di problemi in cui il numero di eventi da ricordare
risulta essere finito e determinato a
priori.
Molti
matematici si sono cimentati nella ricerca di macchine computazionali astratte
in grado di risolvere qualsiasi tipo di problema, o per lo meno tutti quelli
risolvibili attraverso un algoritmo. Si deve a A.M. Turing nel 1936
l’identificazione formale delle caratteristiche che una macchina astratta
(modello matematico) deve avere per poter rappresentare un algoritmo. Si tratta
di pura astrazione matematica, ma che rappresenta un potente strumento
logico-concettuale che ha posto le basi degli studi che hanno condotto alla
realizzazione dei calcolatori programmabili.
La macchina di Turing è un automa composto
di tre elementi:
·
un nastro infinito, suddiviso in caselle,
ciascuna delle quali può contenere un solo simbolo tra quelli appartenenti
all’alfabeto finito d’ingresso/uscita o il carattere speciale blank;
·
una testina di lettura/scrittura, con la
quale l’unità di controllo legge e scrive sul nastro un simbolo per volta;
parallelamente alla testina c’è un meccanismo che muove il nastro a destra o a
sinistra una sola casella alla volta;
·
un’unità di controllo a stati finiti.
Per
simulare il funzionamento della macchina di Turing si:
1.
definisce un
alfabeto finito
2.
sviluppano i vari
stati attraverso la loro descrizione formale
3.
risolve il
problema mediante una tabella di transizione
La
macchina ha un funzionamento ciclico: legge un simbolo dal nastro, da esso e dallo stato interno in quell’istante determina
un simbolo in uscita, un nuovo stato interno e
un movimento sul nastro, fino a raggiungere uno stato senza
configurazione successiva, stato finale del processo.
Ad
ogni operazione di un algoritmo viene associata univocamente una terna di
azioni che la macchina di Turing può svolgere. Pertanto si può ipotizzare che ad ogni algoritmo corrisponde un automa
risolutore, rappresentato da un’appropriata macchina di Turing.
Ogni
problema risolvibile tramite un algoritmo porta alla progettazione di una specifica
macchina di Turing.
Da
ciò l’associazione tra problema,
algoritmo risolutore del problema, macchina di Turing che calcola l’algoritmo.
Successivamente
alla macchina di Turing, evidentemente legata allo specifico problema, i
matematici hanno introdotto la macchina
di Turing universale, la cui logica di funzionamento non è più
legata all’algoritmo in esecuzione. Si tratta di una macchina programmabile in grado di memorizzare la descrizione di
una qualsiasi macchina di Turing e di simularne il comportamento, in pratica
una macchina di Turing capace d’interpretare un’altra macchina di Turing.
Facendo
un parallelo tra teoria e realtà, la macchina di Turing è un calcolatore che
svolge un solo programma, la macchina di Turing universale è un calcolatore con
memorizzazione di più programmi, in grado di svolgere algoritmi diversi.
Approfondimento 3 -
Categorie dei linguaggi evoluti
Sono
elencate di seguito le principali categorie in cui si classificano i linguaggi
di alto livello.
Linguaggi imperativi: il
programma è costituito da una sequenza di istruzioni che modificano il
contenuto della memoria dell'elaboratore o determinano le modalità di
esecuzione di altre istruzioni; assume un ruolo fondamentale l'istruzione di assegnazione. Sono
imperativi la maggior parte dei linguaggi più diffusi (Pascal, Basic, Fortran,
C, Cobol, ecc.).
Linguaggi funzionali: il
programma è considerato come il calcolo del valore di una funzione; in un
linguaggio funzionale puro
l'assegnazione esplicita è completamente assente e si utilizza solo il
passaggio dei parametri. Rivestono particolare importanza la ricorsione, ossia l'utilizzo di funzioni
che richiamano se stesse e, come struttura dati, la lista (sequenza ordinata di
elementi). Il più importante rappresentante di questa categoria è il Lisp (LISt Processing).
Linguaggi dichiarativi: il
programma è considerato come la dimostrazione della verità di una proposizione;
il sorgente è costituito da una sequenza di asserzioni di fatti e regole. Non è
indicato esplicitamente il flusso di esecuzione, ma dato un obiettivo di
partenza (il goal) è il sistema che
cerca di individuare i fatti e le regole rilevanti.
La
parte dichiarativa (il cosa fare) e la parte procedurale (il come) sono
nettamente separate, favorendo la leggibilità del programma.
I linguaggi logici risultano adatti a risolvere problemi che riguardano entità e le loro relazioni.
Linguaggi strutturati: la programmazione
strutturata ha lo scopo di semplificare la struttura dei programmi, limitando
l'uso delle strutture di controllo a pochi casi semplici. L'uso del salto
incondizionato (GOTO) viene sostituito
da istruzioni di controllo del flusso più strutturate (WHILE,FOR,UNTIL)
Linguaggi orientati ad oggetti: il
programma è considerato l'effetto dell'interazione di un insieme di oggetti
(insiemi di dati e algoritmi che manipolano questi dati) che comunicano con
l'esterno mediante messaggi. Oltre a linguaggi specializzati che implementano i
principi di tale metodologia (Smalltalk), sono nate delle estensioni dei
linguaggi già esistenti, che li integrano (ad es. C++ per il C, CLOS per il
Lisp).
Linguaggi orientati agli eventi: in
un ambiente event driven non esiste più una sequenza determinata di comandi da
eseguire ma una serie di reazioni che il sistema ha rispondendo a determinati
stimoli esterni o interni.
Approfondimento 4 -
Le istruzioni di controllo
Di
seguito con blocco intenderemo una
sequenza di operazioni.
Selezione semplice
Un’istruzione
di selezione semplice (istruzione condizionale) è costituita da una condizione
il cui verificarsi o meno determina l’esecuzione delle operazioni di un blocco
B1 oppure di un blocco B2. Lo schema può
anche non prevedere una seconda alternativa.
La
sintassi nei due casi è:

Fig. 17 Diagramma a blocchi della selezione
semplice con e senza alternativa
Selezione multipla
L’esecuzione di uno dei blocchi alternativi B1,
B2,…Bn dipende da una variabile di controllo V che può assumere uno qualunque
dei valori dell’insieme {V1, V2, …Vn}. Se la variabile V non assume alcuno dei
valori dell’insieme viene eseguito il blocco S.
La sintassi è:


Fig. 18 Diagramma a blocchi della selezione
multipla
Si fa ricorso a questa istruzione quando è noto a
priori il numero N di iterazioni che l’esecutore deve svolgere. La variabile di
controllo I all’ingresso del ciclo riceve il numero N e ogni volta, prima di
eseguire il ciclo, si confronta il valore di I col valore finale M. Se I≤M si entra nel ciclo e I viene incrementato di
un’unità. Quando il valore I supera M , il ciclo non viene eseguito e l’iterazione ha termine. Se N>M il blocco
B non viene eseguito.
La
sintassi è:

Fig. 19 Diagramma a blocchi dell’iterazione
enumerativa
Iterazione a controllo iniziale
Un blocco di operazioni viene eseguito una o più volte
mentre la condizione di controllo, posta all’inizio del ciclo, è vera. Quando
la condizione è falsa si esce dal ciclo. Se la condizione di controllo è sempre
falsa, il blocco P non viene mai eseguito.
La sintassi è:

Fig. 20 Diagramma a blocchi dell’iterazione a
controllo iniziale
Iterazione a controllo finale
Il blocco d’istruzioni viene eseguito ripetutamente
fino a quando la condizione di controllo, posta alla fine del ciclo, da falsa
diventa vera. Il blocco P è eseguito almeno una volta.
La sintassi è:

Fig. 21 Diagramma a blocchi dell’iterazione a
controllo finale
Indice
delle Figure
|
Fig. 1 Analisi di un problema |
pag. 6 |
|
Fig. 2 Tecnica del top-down |
pag. 7 |
|
Fig. 3 Algoritmo 1 – Diagramma a blocchi |
pag. 11 |
|
Fig. 4 Algoritmo 2 – Diagramma a blocchi |
pag. 12 |
|
Fig. 5 Algoritmo 3 – Diagramma a blocchi |
pag. 13 |
|
Fig. 6 Algoritmo 4 – Diagramma a blocchi |
pag. 14 |
|
Fig. 7 Rappresentazione schematica di un sistema |
pag. 19 |
|
Fig. 8 Sistema e sottosistemi |
pag. 19 |
|
Fig. 9 Grafo di Moore relativo all’automa dell’esempio |
pag. 22 |
|
Fig. 10 Grafo dell’orologio digitale |
pag. 24 |
|
Fig. 11 Grafo dell’automa che riconosce un identificatore |
pag. 24 |
|
Fig. 12 Grafo dell’automa che
riconosce identificatori e numeri interi |
pag. 25 |
|
Fig. 13 Dal problema alla sua soluzione |
pag. 32 |
|
Fig. 14 Connessione a cascata |
pag. 36 |
|
Fig. 15 Connessione in parallelo |
pag. 36 |
|
Fig. 16 Connessione in retroazione |
pag. 36 |
|
Fig. 17 Diagramma a blocchi della selezione
semplice con e senza alternativa |
pag. 41 |
|
Fig. 18 Diagramma a blocchi della selezione
multipla |
pag. 42 |
|
Fig. 19 Diagramma a blocchi dell’iterazione enumerativa |
pag. 42 |
|
Fig. 20 Diagramma a blocchi dell’iterazione a
controllo iniziale |
pag. 43 |
|
Fig. 21 Diagramma a blocchi dell’iterazione a
controllo finale |
pag. 43 |
|
Tab. 1 Tabella di transizione relativa all’automa dell’esempio |
pag. 22 |
|
Tab. 2 Matrice degli stati |
pag. 23 |
|
Tab.3 Matrice delle uscite |
pag. 23 |
BIBLIOGRAFIA
Linguaggi di programmazione
·
Ballaben, Giovanna - Introduzione alla
programmazione con linguaggi assemblativi / G. Ballaben - Roma - 1989
·
Ausiello, Giorgio - Teoria e progetto di algoritmi
fondamentali / Giorgio Ausiello, Alberto Marchetti-Spaccamela, Marco Protasi
- Milano – 1990
·
Baldi, Emanuele
- Logo : potenza e semplicità / Emanuele
Baldi e Maurizio Di Vizio - Milano – 1984
·
Barrett, Dan - Javascript / Dan Barrett, Dan Livingston e
Micah Brown - Milano – 2000
·
Bartee, Thomas C. - Programmare in Basic / Thomas C. Bartee
- Bologna – 1988
·
Bellini, Alessandro - Linguaggio C / Alessandro
Bellini, Andrea Guidi - Milano – 1995
·
Berk, A. A.
- Lisp : il linguaggio dell'intelligenza
artificiale / A. A. Berk - Milano – 1988
·
Biondi, Joelle
- 1 : Algoritmi e linguaggi / Joelle
Biondi, Gilles Clavel ; con la collaborazionedi S. Estrems ; prefazione di O.
Lecarme ; edizione italiana e traduzione a cura di Alfi , Milano – 1985
·
Boccato, Monica
- Java : il nuovo linguaggio object
oriented per le pagine WWW / Monica Boccato, Pierangelo Ferrari - Milano –
1996
·
Bundy, Alan
- L' automazione del ragionamento
matematico : dalla dimostrazione dei teoremi alla formazione dei concetti /
Alan Bundy ; edizione italiana a cura di Mauro Boscarol - Padova – 1986
·
Cabodi, Gianpiero - Introduzione alla
programmazione in linguaggio C : nozioni fondamentali, esempi ed esercizi /
Gianpiero Cabodi, Stefano Quer, Matteo Sonza Reorda - Milano – 1995
·
Casali, Aureliano - Logo / Aureliano Casali -
Bologna – 1988
·
Ceppatelli, Maria Grazia - Il Cobol : un
linguaggio per la programmazione dei sistemi informativi aziendali / Maria
Grazia Ceppatelli, Gianna Lastri - Padova – 1990
·
Codonesu, Fernando - Programmare in Pascal : dalla
programmazione strutturata alla programmazione orientata agli oggetti /
Fernando Codonesu - Cagliari – 1993
·
Crawford, Marshal A. - Cobol strutturato : corso di
autoistruzione / Marshall A. Crawford, Robert T. Grauer - Milano - stampa
1989
·
Crespi Reghizzi, Stefano - Compilatori
interpreti : tecniche di traduzione / Stefano Crespi Reghizzi - Milano - 1990
·
D'Antona, Gaetano - Linguaggio C / Gaetano
D'Antona - Bologna – 1992
·
Darnell, Peter A. - C : manuale di programmazione
: linguaggio e tecniche di ingegnerizzazione del software / Peter A. Darnell,
Philip E. Margolis - Milano – 1991
·
David, Daniel Jean - Il linguaggio Ada / Daniel
Jean David - Milano – 1985
·
De Nicola, Rocco - Semantica operazionale e
denotazionale dei linguaggi di programmazione / Rocco De Nicola, Adolfo Piperno
- Torino – 1999
·
Di Battista, Giuseppe - Dal
linguaggio Pascal al linguaggio C / Giuseppe Di Battista, Francesco Vargiu
- Milano – 1994
·
Doretti, Roberto - Esercizi di Fortran / Roberto
Doretti, Roberto Farabone - Milano – 1986
·
Eckel, Bruce
- Programmare in C++ / Bruce Eckel -
Milano – 1993
·
Fanelli, Biagio
- Fortran, programmazione grafica ed
elementi di Unix : strumenti per un laboratorio di calcolo / B. Fanelli, L.
Lopez - Bari - stampa 1993
·
Fasano Petroni, Margherita - Automi e
linguaggi / di Margherita Fasano Petroni - Milano – 1984
·
Fiorentini, Mauro - Programmare in C : standard
ISO / Mauro Fiorentini, Carlo Tibaldi - Bologna – 1992
·
Ghezzi, Carlo
- Concetti dei linguaggi di
programmazione / Carlo Ghezzi, Mehdi Jazayeri - Milano – 1989
·
Ghezzi, Carlo
- Informatica teorica / Carlo Ghezzi,
Dino Mandrioli - Milano – 1989
·
Goldberg, David Elliot - Programmare
in Assembly / David E. Goldberg, Jacqueline A. Jones, Pat H. Sterbenz -
Milano – 1989
·
Gonnet, Gaston H. - Handbook of algorithms and data structures :
in Pascal and C / G. H. Gonnet,R. Baeza-Yates - Wokingham – 1991
·
Gottfried, Byron S. - Programmare in C / Byron S. Gottfried -
Milano – 1992
·
Gottfried, Byron S. - Programmare in Pascal / Byron S. Gottfried
- Milano – 1987
·
Gurewich, Nathan - Java : guida al linguaggio per
creare pagine WEB interattive / Nathan Gurewich e Ori Gurewich - Milano –
1996
·
Harold, Elliotte Rusty - Programmare
in rete con Java / Elliotte Rusty Harold - Bresso – 1998
·
Horowitz, Ellis
- Fondamenti di strutture dati in C /
Ellis Horowitz, Sartaj Sahni, Susan Anderson-Freed - Milano – 1993
·
Hughes, Sheila - Lisp / Sheila Hughes – Milano-1987
·
Jamsa, Kris
- Programmare in C : segreti, scorciatoie
e soluzioni / Kris Jamsa - Milano – 1991
·
Koutchouk, Michel - Cobol / M. Koutchouk -
Milano – 1985
·
Lucas, Michel
- Costruzione di algoritmi e
rappresentazione dei dati : file, automi agli stati finiti / Michel Lucas,
Jean-Pierre Peyrin, Pierre-Claude Scholl ; Milano – 1986
·
Naughton, Patrick - Il manuale Java / Patrick
Naughton - Milano – 1996
·
Newcomer, Lawrence R. - Programmare
in Cobol strutturato / Lawrence R. Newcomer - Milano – 1986
·
Brien, Stephen K. - Turbo Pascal 7 / Stephen K.
O'Brien, Steve Nameroff - Milano –
1993
·
Pappas, Chris H. - Il manuale Visual C++ / Chris H. Pappas,
William H. Murray, 3 - Milano – 1996
·
Plauger, P.J. - Standard C library / P.J. Plauger -
Milano – 1993
·
Pratt, Terrence W. - Linguaggi di programmazione /
Terrence W. Pratt; edizione italiana a cura di Paolo Ciancarini - Milano -
c1988
·
Rayward-Smith, Victor J. - Introduzione
alla teoria dei linguaggi formali / V. J. Rayward-Smith ; presentazione a cura
di Luigi Petrone - Torino – 1988
·
Ridolfi, Pierluigi - Il nuovo Fortran : teoria,
esercizi, applicazioni / Pierluigi Ridolfi - Milano -1990
·
Risso, Mario
- Java 2 : programmazione distribuita /
Mario Risso ; Tecnes Milano - Milano – 1999
·
Romani, Francesco - Appunti di teoria degli
algoritmi / Francesco Romani - Genova -1989
·
Rubini, Saverio
- Java 1.2 senza fatica / Saverio Rubini
- Milano – 1999
·
Schildt, Herbert - C : Ansi C e C++ / Herbert Schildt - Milano - 1993
·
Schildt, Herbert - Linguaggio C++ / Herbert Schildt - Milano – 1996
·
Schildt, Herbert - Programmare in Turbo C++ / Herbert Schildt - Milano – 1991
·
Schildt, Herbert - The art of C : elegant programming solutions / Herbert Schildt -
Barkeley - 1991
·
Schwarz, Ron - Il manuale VBScript / Ron Schwarz, Ibrahim Malluf - Milano – 1997
·
Scorzoni, Fabrizia - Cobol / Fabrizia Scorzoni
- Padova – 1989
·
Sedgewick, Robert - Algoritmi in C++ / R. Sedgewick - Milano - 1993
·
Sethi, Ravi
- Linguaggi di programmazione / Ravi
Sethi - Bologna – 1994
·
Shammas, Namir Clement - Introduzione
al C per i programmatori Turbo Pascal / Namir Shammas - Milano – 1992
·
Stroustrup, Bjarne - Il linguaggio C++ / Bjarne
Stroustrup - Milano– 1990
·
Talo, Giuseppe
- Dal Pascal al C : appunti / Giuseppe
Talo ; prefazione di Cesare Mercinelli - Lecce – 1994
·
Toupin, Edward B. - Programmare in C / Edward B.
Toupin - Milano – 1995
·
Touretzky, David S. - Common Lisp : un'introduzione
graduale all'elaborazione simbolica / David S.Touretzky - Bologna – 1991
·
Van der Linden, Peter - Proprio Java / Peter van der Linden - Milano – 1997
·
Waldner, Flavio
- Impariamo il Pascal / Flavio Waldner
- Milano – 1989
·
Welsh, Jim -
Introduzione al Pascal / Jim Welsh, John
Elder ; traduzione di Daniele Nardi, con la collaborazione di Paola Zenobi,
Francesco Donini - Milano – 1989
·
Wilensky, Robert - Common Lisp / Robert Wilensky - Milano
-1988
·
Winder, Russel
- Guida al C++ : corso completo di
programmazione / Russel Winder - Milano – 1993
·
Zarrella, John
- Traduttori di linguaggi : assemblatori,
compilatori, interpreti / John Zarrella - Milano – 1987
·
Zou, Luciana
- Il Pascal : introduzione al linguaggio
con la metodologia della programmazione strutturata / Luciana Zou - Roma
- 1990
·
Zou, Luciana
- La programmazione in Lisp : il primo
linguaggio dell'intelligenza artificiale /Luciana Zou - Roma – 1987
Automi
·
Celati, Carlo
- Automazione industriale : PLC, robot,
intelligenza artificiale, sistemi flessibili di montaggio / Carlo Celati -
Milano – 1995
·
Fu, King Sun
- Robotica / King-Sun Fu, Rafael C.
Gonzales, C. S. George Lee - Milano – 1989
·
Gini, Giuseppina - Robot : controllo,
programmazione, interazione con l'ambiente / Giuseppina Gini, Maria Gini -
Milano – 1983
·
Isidori, Alberto - Il mondo dei robot / di Alberto Isidori - Firenze - 1986 rto Rovetta,
Edmondo Turci - Milano – 1987
·
Kafrissen, Edward - Industrial robots and robotics
/ Edward Kafrissen, Mark Stephans - Reston - c1984
·
Knapp, Brian - Computer e robot / Brian Knapp - Trieste – 1996
·
Hawkes, Nigel -
Robot e computer / Nigel Hawkes - Brescia -1986 e - New York - c1987
·
Rovetta, Alberto - Fondamenti di robotica : il
rapporto uomo-macchina: aspetti scientifici, tecnologici e tecnici della
robotica / Alberto Rovetta - Milano -1990
·
Sciavicco, Lorenzo - Modelling and control of robot
manipulators / L. Sciavicco, B. Siciliano - London - c2000
·
Sciavicco, Lorenzo - Robotica industriale :
modellistica e controllo di manipolatori / Lorenzo Sciavicco, Bruno Siciliano
- Milano – 1995
·
Scott, Peter B.
- La rivoluzione robotica : automazione e
trasformazione dei processi industriali/ Peter B. Scott - Padova – 1987
·
Vukobratovic,
Miomir - Applied dynamics of
manipulation robots : modelling, analysis and examples /Miomir Vukobratovic
- Berlin - c1989