 |
|
|
La comunicazione Seriale |
|
|
|
Per comunicazione seriale, si intende una trasmissione
di dati costituita da una lunga sequenza di alti e bassi ...
1 e 0 che si susseguono l'uno in coda l'altro e che
codificati contengono un'informazione. |
|
Avete mai sentito parlare di Codice Morse ? ... ebbene in
quel caso avremmo parlato di tratti e punti o suono corto e
lungo, qui invece il nostro messaggio � del tipo : |
|
10110001011000100101001010101010100000101011010110....... |
|
|
|
Inizieremo col dire, che la comunicazione seriale pu� avvenire
in due modi : Sincrona ed Asincrona, andiamo
quindi ad analizzarli. |
|
|
|
Comunicazione seriale Sincrona. |
|
|
|
Com'� facile intuire dalla parola, la comunicazione Sincrona,
avviene in presenza di un segnale di sincronismo, ovvero un
segnale di clock. |
|
La trasmissione seriale Sincrona prevede perci� due linee
distinte ... una per i dati, l'altra per il clock. |
|
Il clock � generato dalla fonte di trasmissione ed �
usato dalla fonte ricevente al fine di stabilire con
assoluta precisione la collocazione dei dati presenti sulla
prima linea. |
|
La trasmissione seriale Sincrona permette velocit� di
comunicazione pi� elevate, rispetto alla Asincrona, ed �
possibile, a differenza della Asincrona, inviare interi
pacchetti di dati, preceduti da una sequenza di inizio (header)
e succeduti da una sequenza di fine (tail). |
|
Nella sequenza di fine � possibile include anche un codice
di controllo, per consentire al ricevente di effettuare una
verifica dei dati ricevuti. |
|
Le due Linee, chiamate SDA (Dati) ed SCL
(Clock), sono del tipo a collettore aperto (
elettronicamente parlando, richiedono
una resistenza di Pull-Up). La linea SDA e' di
tipo bidirezionale, e permette lo scambio dei dati tra i
dispositivi I2C collegati, mentre la linea SCL e'
unidirezionale e serve come clock per sincronizzare la
comunicazione.
Dispositivi comuni che usano questo metodo
di comunicazione sono ad esempio le EEPROM della famiglia 24Cxx. |
|
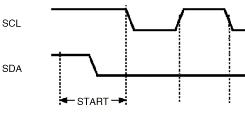
la Sequenza di inizio (Start - Header), in una trasmissione
di dati, prevede il passaggio
dallo stadio 1 a quello 0 della linea SDA mentre la
linea SCL � alta, ovvero con una durata di 1/2 periodo di
clock. |
|
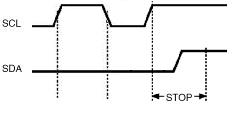
La sequenza di fine (Stop - tail) prevede il passaggio da 0
ad 1, nel momento in cui SCL � alto, sempre con la durata di
1/2 periodo di clock. |
|
La condizione di riposo prevede che i due
segnali siano Alti. |
 |
|
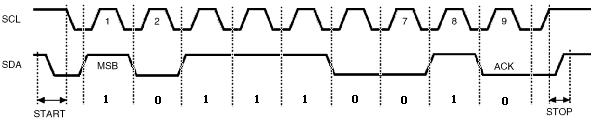
I dati vengono trasmessi a byte (8 bit alla volta), e alla fine della
sequenza troviamo un nono bit basso ( inviato dalla sezione
ricevente ), a conferma dell' avvenuta ricezione. Questo bit
� detto di ACKNOWLEDGE (ACK) |
|
Resta ancora da dire che il valore del Bit (Alto/Basso) �
valido solo quando il clock � alto, tutte le
variazioni sull'SDA sono da considerarsi irrilevanti quando
il clock e basso. |
|
La trasmissione del dato parte sempre dal bit pi�
significativo (MSB). |
|
|
|
 |
|
Come � possibile vedere nella figura, il passaggio dal bit
Alto al Basso e viceversa, avviene sempre quando il clock �
basso. |
|
Ogni dispositivo collegato al bus I2C funge o da slave o da
master ed � identificato da un indirizzo univoco a otto bit
lo SlaveAddress. Lo SlaveAddress � un ottetto di Bit, i
primi 4 vengono rilasciati dal costruttore del componente
elettronico, i successivi 3 servono per indicare il
dispositivo sul Bus I2C (A0,A1,A2), l'ultimo � il R/W... il
master cambiando questo Bit, indica allo slave se vuole
leggere o scrivere. |
|
|
|
Un semplice I2C Bus per la comunicazione seriale possiamo
ottenerlo semplicemente realizzando lo schema sotto
riportato (famoso JDM) |
|
|
|
 |
|
|
|
|
|
|
|
Ora vediamo invece come si pu� realizzare un semplice programmatore
I2C bus su porta parallela. |
|
|
|
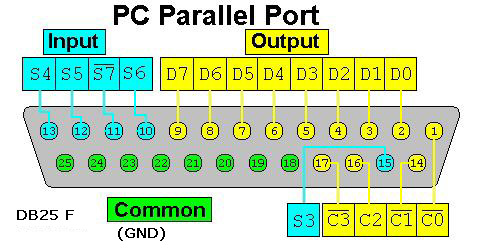
Se analizziamo la piedinatura della porta LPT possiamo
tirare le prime cifre... |
|
 |
|
|
|
I Pin dal 18 al 25 sono la nostra massa, decidiamo quale Pin
utilizzare per In, Out e Clock. |
|
|
|
Se stabiliamo per esempio come pin di Uscita il Pin 2 (D0)
Ingresso il Pin 10 (S6) e clock il pin 16(C2) uno schema
potrebbe essere il seguente |
|
|
|
 |
|
|
|
Bisogner� ora realizzare un programma per scrivere sul Bus.
Il Software, dovr� in sintesi compiere 5 operazioni base : |
|
|
|
- inviare il segnale di start;
- trasmettere l'indirizzo dello slave;
- trasmettere l'indirizzo del particolare
registro interno su cui andare a scrivere (opzionale);
- trasmettere il dato da scrivere sul
registro;
- ricevere l'ancknowledge
- segnale di stop.
|
|
|
|
Vediamo ora qualche passaggio in Basic : |
|
|
|
***************************** |
|
|
|
Impostiamo i registri della porta |
Scl = &H37A
Sdaout = &H378
SdaIn = &H379 |
|
Invia la sequenza di start :
StartScritturaLettura:
'****************************************************************************
Output Sdaout, 0
Output Scl, 0
Return
'****************************************************************************
|
|
|
|
Inviare un Byte : SendByte:
'****************************************************************************
For i = 7 To 0
Step -1
Bit = ByteH And 2 ^ i
If Bit > 0
Then Bit = 1
Else Bit = 0
Output Sdaout, Bit
'******* clock. *******
Output Scl, 4
Output Scl, 0
'*********************
Next i
Output Sdaout, 1
Return
'**************************************************************************** |
|
|
|
|
|
Comunicazione seriale Asincrona. |
|
|
|
la prima cosa che si pu� dire della Comunicazione Seriale
Asincrona � che dispone di una sola linea di dati. Sembra
difficile, dopo aver studiato il metodo di Comunicazione
Sincrona, spiegare il come si faccia a ricostruire
l'informazione avendo a disposizione la sola linea dati ...
in realt� il tutto � supportato da una gran quantit� di
regole standard senza le quali tutto questo sarebbe
impossibile. |
|
Le regole di cui sopra, impongono quindi determinate
caratteristiche Hardware e Software, tali per cui quando due
sistemi si trovano a dover comunicare, questi risultano
pienamente compatibili. |
|
Es. RS232 - RS422 - RS485 |
|
|
|
Abbiamo visto come uno dei compiti assegnati al clock, � anche quello di
avvisare la sezione ricevente di prepararsi a ricevere i
dati ... resta il fatto che nella comunicazione Asincrona
questo manca ... |
|
|
|
Vediamo quindi cosa accade quando inizia la trasmissione
del Byte...
Com'� facile intuire, viene inviata una sequenza di Start, questa �
necessaria affinch� si metta in moto tutto il meccanismo. |
|
|
|
Supponiamo di avere una condizione di riposo e che quindi la
linea sia costantemente a livello logico 1 ... una
variazione dello stato logico, ovvero il passaggio da 1 a 0,
avverte il ricevente che la trasmissione � iniziata. A
questo punto, la sezione ricevente attiva un clock interno,
impostato ad una determinata velocit� di decodifica dei
dati. |
|
le velocit� consentite dallo Standard RS232 vanno da :
75 Bps a
128kBps. |
|
|
|
E facile comprendere quindi che, se le due parti sono state
configurate per una trasmissione a 19200Bps, avremo un treno
di bit in cui ogni bit avr� la durata di 52 microsecondi. |
|
Terminato il Bit di Start, la sezione ricevente, sapr�
precisamente con quale frequenza interpretare i dati in
arrivo, inizier� quindi a leggere con la cadenza
preimpostata. |
|
Terminato il Byte avremo la sequenza di Stop, che nello
standard RS232 pu� prevedere 1, 1-1/2 o 2 Bit, questa volta
Alti ( cio� 1), che riporteranno la linea alla condizione di
riposo. |
|
|
|
 |
|
|
|
la
sequenza di Bit, in questo caso va dal meno significativo LSB (D0) al pi�
significativo MSB (D7), applicando il Bit di Start (0) in
testa ed il Bit di Stop in coda. *************
E' importante a questo punto fare una considerazione.
la comunicazione seriale Asincrona spesso e volentieri
la si ritrova come Standard sui PC. Il Dato, in questo caso,
non nasce seriale ... non stiamo parlando di un bus
I2C dove tutti i componenti comunicano allo stesso modo su 2
Linee, Il nostro Dato � generato da un processore che
nel nostro caso usa un Bus Parallelo.
Quando dobbiamo quindi inviare un Byte � importante
sapere che, esiste un componente elettronico che esegue il
lavoro di trasformare un Byte da Parallelo in Seriale,
stiamo parlando della UART (Universal Asyncronous Receiver/Trasmitter)
************* |
|
Prima di finire, dobbiamo introdurre per� un'altro Bit ... il
cos� detto Bit di parit�,
che anticipa il Bit di Stop, e che � necessario al fine
di assicurare la corretta ricezione.
|
|
In realt� succede che il sistema risulta facilmente
disturbabile da interferenze esterne... ... inoltre
il Bit, a differenza della comunicazione Sincrona, non viene
letto durante il periodo di clock Alto, ma ( e questo anche a seconda delle
specifiche tecniche ) verr� interpretato magari sul fronte di salita
o di discesa del clock locale. |
|
|
|
Se si osserva la figura seguente, si pu� capire che
l'interpretazione del Bit avviene a volte anche a met�
periodo del Bit. |
|
|
|
 |
|
ecco che, commutazioni improvvise dovute ad eventuali
interferenze, possono causare l'errata interpretazione del
Byte. Il Bit di parit� ( a seconda del caso se Pari o
Dispari ) conferma la trasmissione. |
|
|
|
Se per esempio adottiamo un Bit di parit� Pari, questo sar�
0 se il numero di bit nel Byte trasmesso � pari, se il
numero di Bit trasmessi e Dispari, il bit di parit� sar�
Alto ... cosi che il numero di bit trasmessi sar� sempre un
numero Pari, avremo quindi : |
|
|
|
 |
|
|
|
Il discorso sulla Comunicazione seriale Asincrona potrebbe
considerarsi terminato ... |
|
|
|
... per cercare per� di ottenere un esempio pratico,
dobbiamo aprire una piccola parentesi ed affacciarci su un
esempio di Comunicazione Seriale Asincrona che ci sia il pi�
familiare possibile. |
|
Il caso pi� familiare che abbiamo, � proprio quello della seriale del
nostro PC. |
|
In pi�, a tutto quello che abbiamo detto fin ora sulla nostra
comunicazione, c'� da aggiungere che : |
|
Il treno di Bit mostrato nella figura precedente, viene
fuori da un particolare componente chiamato UART, costruito
per convertire i dati dal formato Parallelo ( cos� come
presenti sul Bus ) in Seriale. Questa sequenza di Bit ha 2
livelli logici ormai comuni che sono 0 e 1, ovvero 0V e 5V. |
|
|
|
Il segnale che troviamo sul nostro connettore seriale (9 o 25
Pin) posto sul retro di un PC � diverso, ed � diverso perch�... al fine di diminuire i disturbi e le
perdite di tensione sul cavo, lo standard RS232 ha adottato
livelli logici diversi ... il Bit vale 1 quando il
valore di tensione � compreso tra -3V e -25V, il Bit vale 0
quando il valore di tensione � compreso tra +3V e +25V. |
|
Siccome sui nostri PC le tensioni pi� alte disponibili sono
+12V e - 12V ... vengono adottate queste per la
trasmissione, avremo quindi il seguente risultato: |
|
|
|
 |
|
|
|
I componenti interessati in questo frangente erano in
origine 2, un Driver di linea MC1488 in grado di traslare il
livello di tensione dallo stato TTL a quello RS232 con
relativa inversione, e preparare quindi il segnale ad essere
trasmesso. Alla ricezione, c'era un secondo componente l'
MC1489 ovvero un ricevitore di linea in grado di fare
l'operazione inversa ... ribaltare il segnale e riportarlo a
livello logico TTL. |
|
I tempi nel frattempo corrono, e questi due hanno lasciato il
posto ad un unico componente, Il Max232, molto pi� compatto
ed in grado di gestire contemporaneamente In e Out. |
|
|
|
L'architettura interna di una seriale da PC sar� quindi : |
|
|
|
 |
|
|
|
analogamente uno schema per connettersi ad un
qualsiasi apparecchio con Comunicazione RS232 sar� : |
|
|
 |
|
|
|
Questo in figura � uno dei tanti schemi che si trovano in
giro su Internet per la connessione con i Cellulari,
personalmente realizzato e testato. |
|
|
|
  |
|
|
|
|
|
|
|
|
|
|
|
|
|
|

