
LA STRANA BOLLA
Le applicazioni che fanno uso di nuclei toroidali sfruttano la caratteristica di avere un flusso magnetico disperso quasi nullo. Questo permette, per esempio, di progettare trasformatori di rete con una efficienza particolarmente alta. Lo stesso vale anche per le alte frequenze, purchè si usi un materiale magnetico adeguato alla frequenze di lavoro.
Quindi potrebbe sembrare un controsenso utilizzare un semplice nucleo toroidale per la costruzione di uno statore per un motore sincrono dal momento che il flusso magnetico rimarebbe interamente all'interno del nucleo rendendo vano qualsiasi tentativo di interagire con campi magnetici esterni che nel caso di un motore elettrico sarebbe il rotore. In effetti questa caratteristica di alta efficienza è utilizzata per avere un flusso magnetico disperso particolarmente elevato collegando tra di loro in modo sfasato i vari avvolgimenti messi sul nucleo toroidale. A scopo sperimentale si è costruito uno statore con 4 avvolgimenti tutti uguali costituiti ciascuno di 30 spire di filo smaltato, diametro 0,15mm.
Sarebbe stato meglio aggiungere più spire ma avvolgere manualmente del
filo su un
piccolo nucleo toroidale è oltremodo  tedioso e alla trentesima spira ho pensato che ne avevo
abbastanza. Il nucleo, di ferrite, dal diametro esterno di 18,5mm è stato ricuperato da un
alimentatore switching in disuso. Il materiale non è certo ideale per
un funzionamento a 50Hz o 60Hz, molto meglio sarebbe stato un nucleo
di ferro laminato del tipo usato nei trasformatori ma non è affatto
facile reperirlo della misura giusta. Ho pensato di compensare queste
lacune sul numero delle spire e il materiale poco adatto per lo
statore utilizzando, per
il rotore,
dei piccoli ma potenti magneti al neodimio che avevo disponibili.
tedioso e alla trentesima spira ho pensato che ne avevo
abbastanza. Il nucleo, di ferrite, dal diametro esterno di 18,5mm è stato ricuperato da un
alimentatore switching in disuso. Il materiale non è certo ideale per
un funzionamento a 50Hz o 60Hz, molto meglio sarebbe stato un nucleo
di ferro laminato del tipo usato nei trasformatori ma non è affatto
facile reperirlo della misura giusta. Ho pensato di compensare queste
lacune sul numero delle spire e il materiale poco adatto per lo
statore utilizzando, per
il rotore,
dei piccoli ma potenti magneti al neodimio che avevo disponibili.
Gli avvolgimenti deve essere in numero pari per un'alimentazione monofase, quindi possono essere 2, 4, 6, ecc. e vanno collegati in modo tale che i poli uguali siano sempre insieme, quindi il sud di un avvolgimento con il sud dell'avvolgimento seguente e così via. In questo modo il flusso magnetico tende a fuoriuscire dal nucleo in maniera consistente e interagire con i magneti del rotore che devono essere in numero pari agli avvolgimenti dello statore: 4 in questo caso.
I motori sincroni non partono da soli ad eccezione di quelli di bassissima potenza e inerzia trascurabile e si ricorre quindi a diversi accorgimenti. Nel nostro caso, per avere un disegno meccanico il più semplice possibile, si è fatto uso di un circuito esterno che pilota sia le semionde positive che negative in base alla posizione reciproca tra gli avvolgimenti, magneti e sensore.
In linea di massima, allineando tutti su
una stessa linea si 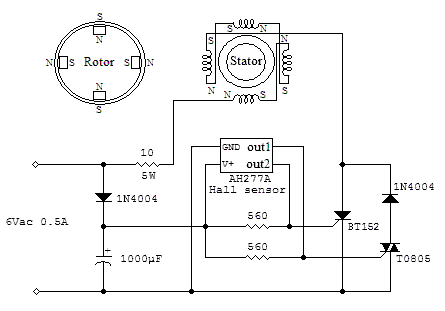 ha sempre la partenza in una ben
determinata direzione. Spostando il sensore sull'avvolgimento
accanto si ha la partenza nella direzione opposta.
Il sensore, che è posto all'esterno del rotore per essere facilmente
spostato fino al suo punto ottimale, è stato recuperato, come molte
delle altri parti meccaniche, da una ventola per computer. Il circuito
può essere adattato a pilotare anche motori di una certa potenza e
quello proposto vale solo come principio. La velocità è di 12,5 giri
al secondo quando è agganciato (in sincrono) con la frequenza di rete
se questa è a 50Hz. Un eccesso di carico tende a far perdere il
sincronismo ma il circuito elettronico prova sempre a ripristinare,
entro certi limiti, la velocità di rotazione giusta, inoltre si può
variare la velocità stessa semplicemente cambiando la posizione del
sensore rispetto al punto ottimale. La costruzione è tutto sommato
semplice se paragonata agli altri tipi di motore elettrico e non
presenta nessuna resistenza alla rotazione poichè le forze magnetiche
all'interno del motore sono sempre bilanciate e contrapposte grazie
proprio allo statore toroidale e l'unica resistenza deriva dal carico
esterno. Altri motori con statore toroidale proposti nel passato
avevano sempre delle fessure o sporgenze che ne complicavano il
disegno e lo rendevano più costoso. Con piccole modifiche al circuito
è possibile anche il funzionamento in corrente continua.
ha sempre la partenza in una ben
determinata direzione. Spostando il sensore sull'avvolgimento
accanto si ha la partenza nella direzione opposta.
Il sensore, che è posto all'esterno del rotore per essere facilmente
spostato fino al suo punto ottimale, è stato recuperato, come molte
delle altri parti meccaniche, da una ventola per computer. Il circuito
può essere adattato a pilotare anche motori di una certa potenza e
quello proposto vale solo come principio. La velocità è di 12,5 giri
al secondo quando è agganciato (in sincrono) con la frequenza di rete
se questa è a 50Hz. Un eccesso di carico tende a far perdere il
sincronismo ma il circuito elettronico prova sempre a ripristinare,
entro certi limiti, la velocità di rotazione giusta, inoltre si può
variare la velocità stessa semplicemente cambiando la posizione del
sensore rispetto al punto ottimale. La costruzione è tutto sommato
semplice se paragonata agli altri tipi di motore elettrico e non
presenta nessuna resistenza alla rotazione poichè le forze magnetiche
all'interno del motore sono sempre bilanciate e contrapposte grazie
proprio allo statore toroidale e l'unica resistenza deriva dal carico
esterno. Altri motori con statore toroidale proposti nel passato
avevano sempre delle fessure o sporgenze che ne complicavano il
disegno e lo rendevano più costoso. Con piccole modifiche al circuito
è possibile anche il funzionamento in corrente continua.
Un'altra
caratteristica interessante in comune con i motori sincroni, specialmente se si sale di potenza, è che il motore presenta un carico puramente
 resistivo, 2,9 ohm nel nostro caso, grazie proprio
al modo in
cui sono collegati
gli avvolgimenti. Gli altri dati elettrici sono una tensione misurata
ai capi del motore
di 1,2Vac e una corrente
di 0,41A. Naturalmente, come molte macchine elettriche, può essere
usato come generatore. In questo caso entrano in gioco altri fattori e sempre tenendo conto che la costruzione è
tutt'altro che ottimizzata si sono ottenuti 0,4Vac a parità di
rotazione. Una peculiarità di questo
sistema è che il rotore è libero di ruotare liberamente
poichè la distanza tra i magneti del rotore e l'anello è sempre la
stessa è non c'è una posizione privilegiata dove fermarsi.
resistivo, 2,9 ohm nel nostro caso, grazie proprio
al modo in
cui sono collegati
gli avvolgimenti. Gli altri dati elettrici sono una tensione misurata
ai capi del motore
di 1,2Vac e una corrente
di 0,41A. Naturalmente, come molte macchine elettriche, può essere
usato come generatore. In questo caso entrano in gioco altri fattori e sempre tenendo conto che la costruzione è
tutt'altro che ottimizzata si sono ottenuti 0,4Vac a parità di
rotazione. Una peculiarità di questo
sistema è che il rotore è libero di ruotare liberamente
poichè la distanza tra i magneti del rotore e l'anello è sempre la
stessa è non c'è una posizione privilegiata dove fermarsi.
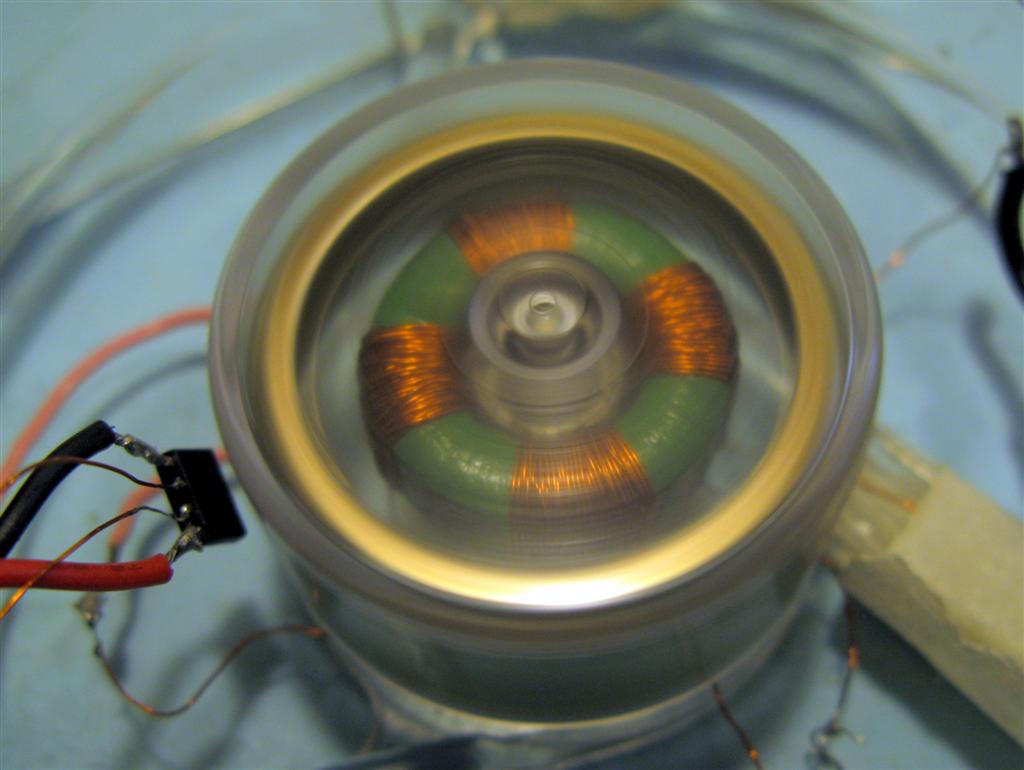
L'ultima immagine
mostra il motore assemblato e in rotazione. Il rotore è in plastica
trasparente e permette di vedere l'interno che torna utile per mettere
il sensore, il piccolo integrato nero alla sinistra, nella posizione
migliore e sperimentare le varie possibilità offerte da una costruzione
di questo tipo.
L'uso di semplici toroidi per ottenere un movimento meccanico ci porta a considerare anche altre applicazioni, alcune delle quali totalmente inedite, che varrebbe la pena di investigare più a fondo.
 togliere s dall'indirizzo
togliere s dall'indirizzo
