|
SHUTTLEBOT PROGETTO PER UN ROBOT-NAVETTA |
||
|
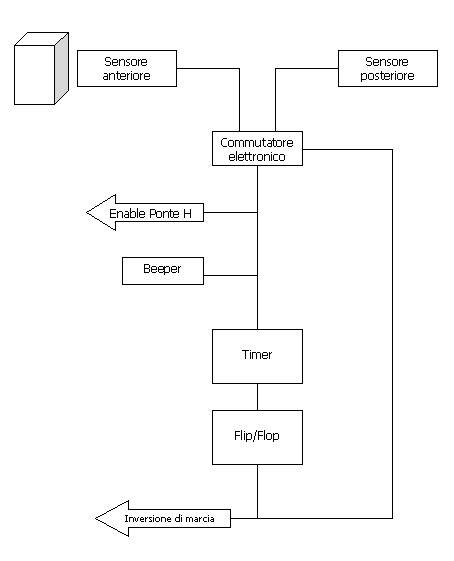
NOTA: TUTTI GLI SCHEMI SONO TEORICI Questo progetto nasce dall'idea di costruire un "robot navetta" in grado di navigare per il corridoio dell'Istituto dove lavoro, ad es. da un laboratorio all'altro. Come guida per la navigazione il robot usa una linea tracciata sul pavimento del corridoio che va dal punto "A" al punto "B". La linea viene letta da un sensore di linea. Il robot monta poi dei sensori di prossimità, per evitare eventuali ostacoli sul suo passaggio: in questo caso il robot deve fermarsi e azionare un segnalatore acustico. Se entro un tempo prestabilito (es. 1 minuto) il passaggio non viene liberato, il robot deve tornare indietro al punto di partenza. Una volta arrivato alla fine della linea, il robot deve fermarsi e azionare il segnalatore acustico, attendere un tempo prestabilito e poi tornare indietro. Il disegno che segue mostra come potrebbe essere costruito il robot:
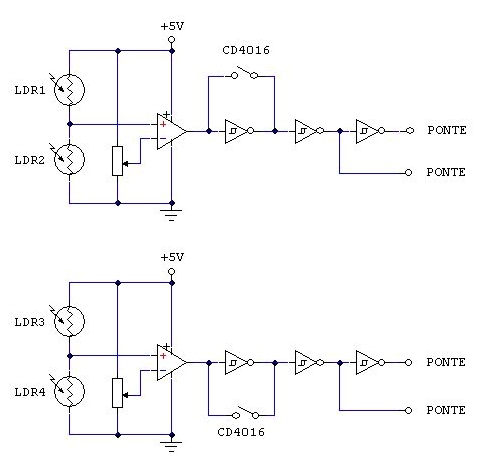
La parte relativa ai sensori di linea e all'inversione di marcia è illustrata nel disegno qui sotto:
Gli interruttori sono in realtà degli switch elettronici (CD4016/CD4066) azionati dal comando "Inversione di marcia".
SEGNALATORE ACUSTICO
L'oscillatore è bloccato quando DIS è a livello logico 0
L'oscillatore è bloccato quando DIS è a livello logico 1 |
||