|
MINIMEK - UN SEMPLICE MINIROBOT ELETTROMECCANICO |
| | SCHEMA ELETTRICO | AUTOCOSTRUZIONE DEI SENSORI | COME FUNZIONA? | |
|
Seguendo le istruzioni presentate su questa pagina, potrete costruire un semplice robot elettromeccanico. Questo progetto è dedicato ai principianti assoluti, cioè a coloro che non sanno nulla di elettronica, ma vogliono cominciare a trafficare con fili, motori, interruttori e roba simile. In attesa di passare a qualcosa di più complesso (resistenze, condensatori, transistor, integrati, ecc.). Il minirobot si compone di 7 parti:
Il minirobot che costruirete sarà in grado di "navigare" in un ambiente, cambiando direzione quando incontra un ostacolo. Potete anche organizzare
delle gare, costruendo dei percorsi a ostacoli e assegnando un premio al
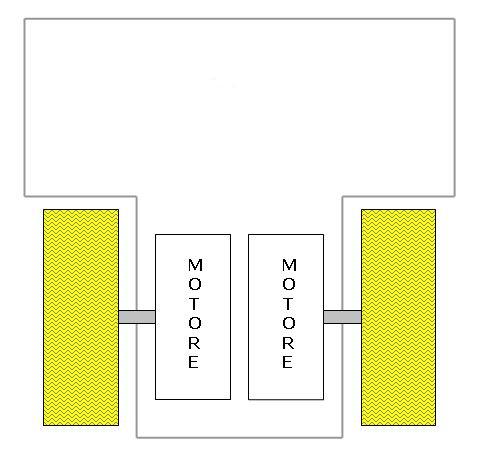
minirobot che riesce a uscire più velocemente dal labirinto. 1. IL TELAIO Le dimensioni del telaio dipendono dal tipo di motori e di ruote che siete riusciti a procurarvi. Per cui andate prima a leggervi i punti 2 e 3 e poi tornate qui. Per costruire il telaio potete usare il materiale che più vi piace: legno, plastica, compensato, metallo, ecc. Nei negozi di bricolage si vendono dei pezzi metallici preforati dello spessore di ca. 3 mm. Questo li rende molto robusti e resistenti, ma allo stesso tempo pesanti e difficili da forare. Anche i pezzi del Meccano sono molto adatti allo scopo. Al contrario il cartone è assolutamente sconsigliato. Quello che conta è che la struttura sia solida e che il minirobot stia perfettamente in piano. La forma più usata è una specie di T come nel disegno che segue:
Se proprio siete disperati, prendete una scatola di plastica, capovolgetela e usatela come telaio, collocando motori e pile all'interno e facendo due buchi per far uscire gli alberi del motore e attaccare le ruote
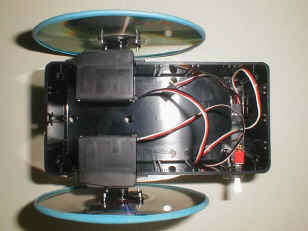
2. MOTORI E RUOTE I motori devono essere dotati di ingranaggi. Infatti l'ingranaggio trasforma la velocità del motore in potenza, permettendo di trasportare il carico (pile, circuito e il telaio stesso). I primi hobbysti usavano dei servomotori da modellismo modificati, in modo che l'albero potessere compiere una rotazione completa di 360°. La modifica dei servomotori è però una operazione molto delicata (vedi http://www.ivotek.it/robotica/TUTORIALMICROROBOTWEB/LEZIONE14.HTM). In alternativa potete acquistare dei motori già muniti di ingranaggi: ce ne sono di molto costosi e di economici (meno di 10 euro). Fate una ricerca su internet alla voce "motoriduttori" o guardate http://www.robot-italy.com/it/gearmotors/mixed/where/p/2.html. . Un sistema ancora più economico consiste nello smontare vecchi giocattoli e recuperare motorini e ruote. Cercate di
scegliere i motori abbinati alle ruote, per non avere problemi a fissare
le ruote ai perni. Su internet si trovano le
cose più strane, persino ruote fatte con dei vecchi CDRom: l'importante
è che le ruote siano ben fissate al perno dei motori. 3. TERZA RUOTA La terza ruota può essere facilmente comprata con pochi soldi in un negozio di bricolage. Si tratta di quelle ruote che vengono usate per i carrelli o per poltrone, tavolini, ecc. Vengono chiamate "ruote pivottanti" perché l'asse di rotazione può girare di 360° attorno all'asse verticale.
In alternativa alle ruote pivottanti potete usare delle sfere come quelle delle foto qui sotto. Ho notato che queste sfere talvolta hanno la tendenza a bloccarsi, forse a causa delle particelle di polvere che entrano e provocano attrito. Comunque, anche le sfere si trovano nei negozi di bricolage.
Qualcuno usa anche un semplice perno filettato con un dado cieco o un pomello a un'estremità, ma in questo caso l'attrito con la superficie di contatto è elevato. Inoltre se la superficie presenta delle irregolarità (buchi o fessure) il dado/pomello tende a incastrarsi, bloccando la navigazione del robot.
4. BATTERIE Il numero di batterie dipende dal tipo di motori che avete montato sul minirobot. Ad esempio, se usate dei motori da 6 Volt dovete utilizzare un'alimentazione di 6 Volt che si può ottenere con 4 batterie da 1,5V poste in serie (1,5 x 4 = 6). Per tenere insieme le batterie potete utilizzare gli appositi portabatterie che si trovano nei negozi di materiale elettrico
Qualcuno potrebbe pensare
di usare delle batterie ricaricabili, oggi facilmente reperibili anche nei
supermarket. In questo caso tenete presente che ogni batteria ricaricabile
eroga 1,2 Volt e se quindi dovete ottenere 6 Volt ve ne occorrono 5 (1,2 x
5 = 6) e non 4 come per le batterie "normali" (non
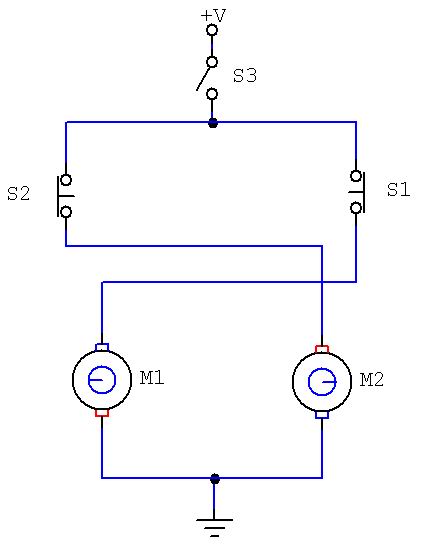
ricaricabili). 5. INTERRUTTORE L'interruttore serve per accendere e spegnere il robot. Potete usare qualsiasi tipo di interruttore: a slitta, a levetta, a pulsante, ecc.
L'interruttore va
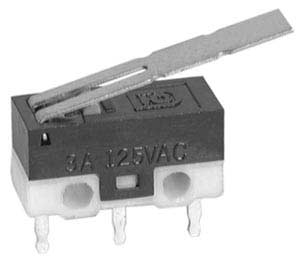
collegato in serie al portapile, come spiegato nello schema. I sensori di contatto sono la parte più delicata, perché vanno realizzati da sè (a meno che non vogliate spendere un sacco di soldi!). La buona resa del vostro progetto è affidata al 80% alla qualità dei sensori. Se il sensore funziona bene, allora il minirobot funzionerà bene, altrimenti potrebbe non accorgersi degli ostacoli o "impazzire" e sterzare anche quando non ci sono ostacoli. Dei sensori di contatto si possono realizzare facilmente acquistando due interruttori "finecorsa" tipo quello che vedete nella foto:
a. Identificate il contatto centrale (di solito indicato con 0) e il contatto normalmente chiuso (indicato con NC) e saldateci due pezzetti di filo. b. Poi montate i finecorsa sulla parte frontale del minirobot, uno a destra e l'altro a sinistra, in modo che le lamelle formino una specie di "V". c. Se la lamella non è abbastanza lunga, saldateci un pezzetto di lamierino o di filo rigido. Per avere un'idea di come dovrebbe essere il montaggio, date un'occhiata qui.
d. Collaudate i sensori: quando premete la lamella il motore deve fermarsi. Fate attenzione allo schema: il sensore di sinistra comanda il motore destro, il sensore di destra comanda il motore sinistro. È possibile realizzare da sè i sensori, senza acquistare gli interruttori fine-corsa? Non solo è possibile, ma è anche più divertente. Date un'occhiata alle pagine seguenti: http://www.robotshop.com/gorobotics/articles/robots/how-to-build-a-simple-robot-beetle-robot http://www.beam-online.com/Robots/Tutorials/Tactile/tactile.html http://www.solarbotics.com/assets/documentation/solarbotics_photopopper_kit_may032007.pdf [pp. 15 e 16] Questi sensori vanno
modificati facendo in modo che il contatto rimanga normalmente chiuso
e si apra quando il robot incontra un ostacolo. 7. LED E LUMINARIE ASSORTITE Per rendere il minirobot
più spettacolare, potete aggiungere delle lampadine (o dei LED) secondo
la vostra fantasia. Ad esempio, delle lampadine si possono collegare in
parallelo al motore (si spengono quando il motore si ferma).
Quanto gli interruttori S1 e S2 sono chiusi, il robot procede in avanti. Quando uno dei due interruttori si apre (perché il sensore incontra un ostacolo) il motore del lato opposto si ferma facendo sterzare il robot. |