| «SPEEDLINER»
(LINE FOLLOWING ROBOT) |
|
Chi ha provato a costruire un line-following usando due fotoresistenze (o fotodiodi) come sensori di linea, dopo un primo iniziale entusiasmo avrà notato che le prestazioni non sono molto soddisfacenti. In particolare in presenza di curve molto strette, il robot ha la tendenza ad andare in stallo oppure "perde" la linea ed esce dal percorso.
Fig.1: con due soli sensori il robot non "vede" la curva Per migliorare la tenuta del robot è necessario aggiungere almeno altri due sensori che leggano al di fuori della linea. Questa semplice modifica migliora sensibilmente l'andatura e la precisione del robot. Inoltre, collegando opportunamente i sensori al driver dei motori si può far fermare automaticamente il robot a fine percorso.
Fig.2: i due sensori laterali aggiungono definizione alla "visione" del robot 1. CHASSIS
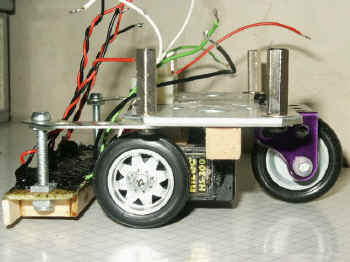
Lo chassis del robot è composto da alcuni pezzi di lamierino e legno. I motori (due servo modificati) sono incollati con il silicone. I sensori ottici di linea sono montati in una specie di "spoiler" costruito con ritagli di compensato e fissato nella parte anteriore. La ruota posteriore è realizzata con pezzi di Meccano.
2. SENSORI DI LINEA I due fotoelementi (LDR) collocati ai lati del LED centrale servono a mantenere il robot sulla linea. Quelli collocati esternamente leggono al di fuori della linea e servono a migliorare le prestazioni in curva. Rispetto a sensori con due soli fotoelementi, questo sensore "multiplo" migliora l'inseguimento della linea ed evita lo stallo in curva.
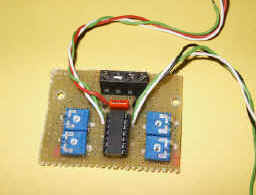
3. COMPARATORE Il controllo dei sensori di linea è costituito da un quadruplo comparatore (LM339). La sensibilità è regolata mediante dei trimmer.
4. CONTROLLO MOTORI (PONTE H) Il ponte H è costruito attorno a degli integrati MAX4426. |