|
 Valentino Braitenberg
(1926 - 2011) è
un neurologo e studioso di cibernetica italiano. È noto al pubblico dei non specialisti per il
suo libro "I
veicoli pensanti. Saggio di psicologia sintetica" in cui descrive
alcune macchine analogiche composte da una combinazione di sensori e di
attuatori (motori elettrici). Si tratta di robot reattivi caratterizzati
da una connessione diretta tra le componenti sensibili e quelle che ne
governano il movimento. La connessione tra sensori e attuatori può essere
di tipo eccitatore (più il sensore è eccitato, più la velocità del motore
aumenta) o inibitore (più il sensore è eccitato più la velocità
diminuisce). Inoltre i sensori possono essere connessi agli attuatori in
modo diretto o incrociato. Le varie combinazioni permettono di realizzare
alcuni tipi di veicoli, ciascuno dei quali mostra un diverso
comportamento: PAURA, AGGRESSIVITÀ,
AMORE, CURIOSITÀ, ecc. Valentino Braitenberg
(1926 - 2011) è
un neurologo e studioso di cibernetica italiano. È noto al pubblico dei non specialisti per il
suo libro "I
veicoli pensanti. Saggio di psicologia sintetica" in cui descrive
alcune macchine analogiche composte da una combinazione di sensori e di
attuatori (motori elettrici). Si tratta di robot reattivi caratterizzati
da una connessione diretta tra le componenti sensibili e quelle che ne
governano il movimento. La connessione tra sensori e attuatori può essere
di tipo eccitatore (più il sensore è eccitato, più la velocità del motore
aumenta) o inibitore (più il sensore è eccitato più la velocità
diminuisce). Inoltre i sensori possono essere connessi agli attuatori in
modo diretto o incrociato. Le varie combinazioni permettono di realizzare
alcuni tipi di veicoli, ciascuno dei quali mostra un diverso
comportamento: PAURA, AGGRESSIVITÀ,
AMORE, CURIOSITÀ, ecc.
«I capostipiti di
tutta la razza, il veicolo 1 e il veicolo 2, sorgono da un
tentativo di spiegare la presenza di chiasmi nel cervello, e in
particolare il chiasma ottico dei vertebrati, che fra questi è forse il
meglio noto. Chiasma è un termine tecnico usato in neuroanatomia per
definire l'incrocio di due fasci nervosi, spesso fra le due metà, destra e
sinistra, del cervello. Nel chiasma ottico, circa un milione di fibre dei
due nervi ottici, il cui compito è quello di portare i segnali dagli occhi
al cervello, si incrociano in maniera da formare nell'emisfero destro
un'immagine di tutto quanto succede nella metà sinistra del campo visivo
dell'animale, e viceversa. [...] È
interessante notare poi che la stessa regola vale per il tatto, dove
l'informazione dovuta alla metà destra della pelle va nell'emisfero
sinistro, e viceversa, e che anche il sistema motorio è incrociato, dato
che i neuroni corticali associati a un certo movimento sono situati
nel lato opposto del cervello rispetto al lato dove si trova l'arto che
quel movimento compirà. C'è del vero dunque nell'affermare che le due metà
del mondo sono rappresentate nelle metà opposte del cervello. Che
spiegazioni si potrebbero dare a questo stato di cose?» (da V. Braitenberg,
Note biologiche ai veicoli).
|
Veicolo 2a |
Veicolo 2b |
Veicolo 3a |
Veicolo 3b |
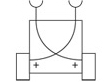
COLLEGAMENTO ECCITATORE
DIRETTO |
COLLEGAMENTO ECCITATORE INCROCIATO |
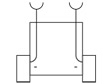
COLLEGAMENTO INIBITORE
DIRETTO |
COLLEGAMENTO INIBITORE
INCROCIATO |
 |
 |
 |
 |
|
PAURA
il robot evita
la
fonte luminosa |
AGGRESSIVITÀ
il robot si
dirige verso la fonte luminosa sino a sbatterci contro |
AMORE
il robot tende
verso la fonte luminosa
e si ferma in prossimità
della luce |
CURIOSITÀ
il robot tende
verso la fonte luminosa, ma giunto vicino
alla luce la sfugge |
«Braitenberg
cerca di mostrare come dei comportamenti psicologici anche complessi
possono già venir prodotti anche da strutture cerebrali semplici. Per far
ciò egli costruisce dei modelli teorici di strutture cerebrali. Ma invece
di pensare a dei computer come modelli, la novità è di considerare delle
macchine che si muovono, dei veicoli. E, per il fatto che si muovono, le
macchine di Braitenberg incontrano un ambiente vario e ad esso reagiscono.
Il libro è costruito in modo molto abile - a partire dalla introduzione
della versione italiana di P. Bozzi - per farci pensare che i veicoli sono
non tanto dei modelli teorici, ma dei giocattoli esistenti in un
laboratorio, fatti di componenti semplici come motorini, ruote, sensori.
Per non entrare in materie astratte, Braitenberg evita di utilizzare tra i
componenti i microprocessori per elaborare le informazione come
sembrerebbe naturale al giorno d'oggi. Collega invece con dei fili i
sensori e gli attuatori. Si direbbero giocattoli un po’ superati, di 10-20
anni fa, utilizzanti ancora le logiche cablate. Ma ciò rafforza l'idea che
sono giocattoli costruibili con le "nostre mani" e quindi a noi noti in
tutti i particolari. Braitenberg parte da un veicolo molto semplice : due
motori, uno per ruota, due sensori, ad esempio delle fotocellule. Quando
l'intensità di luce aumenta, il motore aumenta la sua potenza. A questo
punto, basta già invertire il collegamento tra sensori e ruote (sensore di
sinistra collegato alla ruota di destra), perchè il comportamento del
veicolo sia molto diverso da prima. Invece di fuggire una sorgente
luminosa, vi precipita contro. Braitenberg costruisce via via veicoli più
complessi, ma tutti ancora abbastanza semplici, o almeno così sembra.
Aumenta il numero dei sensori e i relativi segnali si sommano o si
differenziano, vengono ritardati, immagazzinati o servono per fare
anticipazioni sul cambiamento di scena. Lo straordinario è che, per
complessità ancora modeste della macchina, il suo comportamento diventa
del tutto imprevedibile, ed è descrivibile solo utilizzando il linguaggio
della psicologia: paura, amore, logica, egoismo, ecc...»
(U.
L. BUSINARO,
Le macchine pensanti e le due culture, 1984).
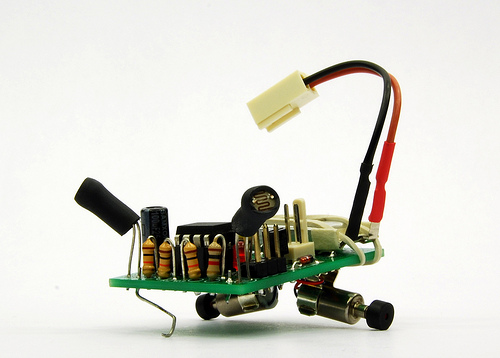
Sulla rete è facile trovare schemi teorici e
simulazioni al computer di questi "veicoli pensanti", oltre a qualche
modello costruito attorno a un microprocessore programmabile. Per
quanto mi riguarda, ho trovato un solo schema elettrico con componenti
discreti (fotoresistenze e transistor) alla pagina
Project #1 - Braitenberg Bugs.
Da questa pagina è tratto lo schema che
segue:
Come sensori vengono usate due
fotoresistenze (LDR) la cui sensibilità è regolata tramite delle
resistenze variabili. I
transistor permettono di pilotare i motori con le basse correnti del
partitore composto da LDR e potenziometro. Il commmutatore S1 modifica il
collegamento dei sensori da eccitatore a inibitore, mentre il commutatore
S2 inverte il collegamento degli attuatori da diretto a incrociato.
Per maggior chiarezza ho ridisegnato lo
schema dei collegamenti tra le basi (B) e gli emettitori (E) dei
transistor
e i commutatori
S1 e S2.
|
COLLEGAMENTO ECCITATORE |
COLLEGAMENTO INIBITORE |
Come si vede, quando il commutatore S1
collega le LDR tra il positivo e la base dei transistor, otteniamo un collegamento
eccitatore (+) e la velocità del robot aumenta all'aumentare della luce.
Quando, al contrario, le LDR sono collegate tra la base dei transistor e
il negativo (GND) abbiamo un collegamento inibitore (−)
e la velocità del
robot diminuisce all'aumentare della luce.
COLLEGAMENTO DIRETTO |
COLLEGAMENTO INCROCIATO |
Il commutatore S2 permette invece di effettuare collegamenti diretti o incrociati tra gli
emettitori dei transistor e i motori. In questo modo, azionando i commutatori S1 e S2 possiamo
ottenere i quattro comportamenti dei veicoli 2 e 3 descritti da
Braitenberg: paura, aggressività, amore e curiosità.
Come si vede nella tabella, i veicoli PAURA - AMORE e AGGRESSIVITÀ
- CURIOSITÀ
sono strutturalmente uguali, ma si
differenziano per il tipo di connessione dei sensori (eccitatore o
inibitore).
Si può notare un'analogia tra
il veicolo PAURA e il veicolo CURIOSITÀ: entrambi sono caratterizzati da
un sentimento di avversione per l'oggetto che eccita i sensori, ma
mentre il primo veicolo si allontana dall'oggetto in modo veloce e
deciso, il secondo lo fa
lentamente e in modo graduale.
Un'analogia si può osservare anche fra il veicolo AGGRESSIVITÀ e il
veicolo AMORE: entrambi sono caratterizzati da un sentimento di
attrazione per l'oggetto che eccita i sensori, ma mentre il primo
veicolo entra in contatto fisico con l'oggetto in modo piuttosto violento, il
secondo si ferma a una certa distanza, come in contemplazione dell'oggetto
amato.
Queste osservazioni fanno pensare alla possibilità di creare dei veicoli
che siano la combinazione di comportamenti diversi, ma analoghi.
SCHEMA COMPLESSIVO DEL VEICOLO
|
|
ELENCO COMPONENTI
2 fotoresistenze
2 potenziometri 10k
2 resistenze 100 Ohm
2 transistor TIP102
2 commutatori 2 vie - 2 posizioni
2 motoriduttori
2 ruote
4 pile 1,5V |
|
 |
 |
VALENTINO BRAITENBERG, I veicoli
pensanti. Saggio di psicologia sintetica, MIMESIS 2007 (ed.
originale Garzanti, 1984) |
|