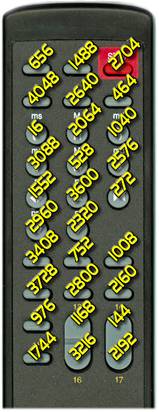
Telecomando DeA - codici hex telecomando - codici dec da nutchip
Telecomando
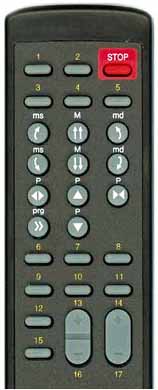
Il telecomando permette di comandare a
distanza il robot. Il sistema usato è a infrarossi.
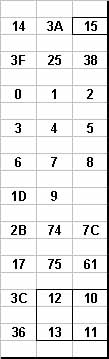
la prima figura mostra il telecomando fornito dalla deA, mentre la seconda
visualizza i codici esadecimali corrispondenti ai vari tasti.
Il sistema ricevente nel robot, per la parte hardware, è composto da uno dei due
sensori a infrarossi già utilizzati per rilevare gli ostacoli, per quanto
riguarda la decodifica dei segnali, si opererà a livello software.
Telecomando DeA
- codici hex telecomando - codici
dec da nutchip
Ricezione del telecomando a infrarossi
'--------------------
Dichiarazioni Variabili --------------
IR_det_pin CON 8 '
sensore Infrarosso
active_low CON 0 '
Stato logico impuslo Telecom.
active_high CON 1 ' Stato
logico impuslo Telecom.
debounce_time CON 200 ' Pausa antirimbalzo
IR_pulse VAR Word(7) ' impulsi telecomando
counter VAR Nib
' contatore
entered_value VAR Word ' valore immesso
IR_message VAR Byte ' codice telecomando
'---------------------- Subroutine
rilevamento codice -----------------
check_for_stop_bit:
PULSIN IR_det_pin,active_high,IR_pulse(0)
IF IR_pulse(0) > 1400 AND IR_pulse(0) <> 0 THEN continua
GOTO check_for_stop_bit
continua:
PULSIN IR_det_pin,active_low,IR_pulse(0)
PULSIN IR_det_pin,active_low,IR_pulse(1)
PULSIN IR_det_pin,active_low,IR_pulse(2)
PULSIN IR_det_pin,active_low,IR_pulse(3)
PULSIN IR_det_pin,active_low,IR_pulse(4)
PULSIN IR_det_pin,active_low,IR_pulse(5)
PULSIN IR_det_pin,active_low,IR_pulse(6)
FOR counter = 0 TO 6
LOOKDOWN IR_pulse(counter), < [400,800], IR_message.LOWBIT(counter)
NEXT
LOOKUP IR_message,[1,2,3,4,5,6,7,8,9,0,21],IR_message
entered_value = entered_value * 10 + IR_message
PAUSE debounce_time
DEBUG CLS, "hai premuto il pulsante : ", DEC1 IR_message, CR
'----------------------------------------------------------------------------
Come vedete, la routine è alquanto pesante, inoltre bisogna impostare un loop stretto per evitare di perdere dei tasti. Con l'utilizzo del nutchip si ottengono notevoli miglioramenti.
Ricezione del telecomando a infrarossi con SERIN e SEROUT ed il Nutchip
|
La ricezione funziona sempre, qualsiasi sia la tavola della verità dentro il Nutchip.
|
| Elenco revisioni | |
| 24-11-2005 | Prima emissione |