Qui sotto i link al sito
www.i-d01.deagostini.it
per scaricare i file pdf con le istruzioni di montaggio.
(Attenzione i file possono impiegare parecchio tempo per essere scaricati)
 Fasicolo 34 0,8 mb |
Fasicolo 35 1,1 mb |
Fasicolo 36 1,0 mb |
Fasicolo 37 1,0 mb |
Fasicolo 38 1,3 mb |
Fasicolo 39 1,1 mb |
|
Fasicolo 40 1,3 mb |
Fasicolo 41 1,3 mb |
Fasicolo 42 2,3 mb |
|
Il sistema di locomozione
I-D01 è, per definizione, un robot mobile. I robot mobili,
infatti, hanno la caratteristica di potersi spostare in un ambiente. Di solito
la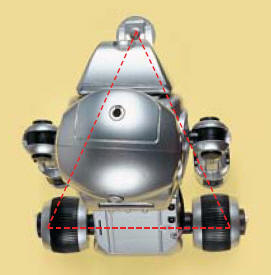 loro locomozione è basata su ruote, zampe o, in casi più particolari, su
sistemi ibridi. La prima scelta, quella effettuata anche per I-D01, consente
di mantenere semplice il sistema di gestione dei movimenti e, allo stesso
tempo, di ottenere una migliore stabilità. Una ruota si dice motrice se è
azionata da un motore che può farla ruotare, in modo che essa avanzi sul
terreno: di questo tipo sono le due ruote anteriori di cui sarà dotato
I-Droid01 al termine dell’assemblaggio del sistema di locomozione. Per contro,
la ruota posteriore del robot non è azionata da alcun motore, ma è libera di
muoversi attorno all’asse verticale e, quindi, di girare su se stessa
(immagine sotto a sinistra). Parlando in generale, il numero e la disposizione
delle ruote di un robot sono scelti in modo da garantire da una parte mobilità
e, dall’altra, quella che viene detta ‘stabilità statica’: in condizioni di
‘riposo’ l’equilibrio deve essere garantito. Ad esempio, le soluzioni a
quattro ruote (come per le automobili) garantiscono un’elevata stabilità, ma
non permettono la rotazione sul posto del robot, con conseguenti problemi nei
movimenti
loro locomozione è basata su ruote, zampe o, in casi più particolari, su
sistemi ibridi. La prima scelta, quella effettuata anche per I-D01, consente
di mantenere semplice il sistema di gestione dei movimenti e, allo stesso
tempo, di ottenere una migliore stabilità. Una ruota si dice motrice se è
azionata da un motore che può farla ruotare, in modo che essa avanzi sul
terreno: di questo tipo sono le due ruote anteriori di cui sarà dotato
I-Droid01 al termine dell’assemblaggio del sistema di locomozione. Per contro,
la ruota posteriore del robot non è azionata da alcun motore, ma è libera di
muoversi attorno all’asse verticale e, quindi, di girare su se stessa
(immagine sotto a sinistra). Parlando in generale, il numero e la disposizione
delle ruote di un robot sono scelti in modo da garantire da una parte mobilità
e, dall’altra, quella che viene detta ‘stabilità statica’: in condizioni di
‘riposo’ l’equilibrio deve essere garantito. Ad esempio, le soluzioni a
quattro ruote (come per le automobili) garantiscono un’elevata stabilità, ma
non permettono la rotazione sul posto del robot, con conseguenti problemi nei
movimenti  in spazi
angusti. Diminuendo il numero di ruote a tre si rendono possibili movimenti
più ‘agili’, come la rotazione sul posto, pur mantenendo un buon grado di
stabilità; in I-Droid01, ad esempio, le tre ruote, poste ai vertici di un
triangolo ideale (vedi immagine in alto a destra), permettono al robot di
rimanere tranquillamente in equilibrio. La configurazione utilizzata da I-D01
rappresenta un’ottima scelta anche dal punto di vista della mobilità. Come
detto altre volte, infatti, essa prevede l’uso di due ruote motrici
controllate separatamente più una terza ruota passiva libera di girare: se le
velocità delle ruote motrici sono tra loro identiche e se anche il verso di
rotazione è coerente, il robot avanza (o indietreggia) lungo un percorso
rettilineo; se una ruota gira alla stessa velocità dell’altra, ma in senso
opposto, il robot ruota su se stesso. Tornando a un discorso più generale sui
robot, altre possibili configurazioni prevedono l’uso di tre ruote motrici e
sterzanti (cioè azionate da un primo motore che le fa ruotare e di un secondo
che le fa girare verso destra o sinistra) oppure (nella configurazione ‘a
triciclo’) di una ruota motrice e sterzante e di due passive, o ancora quella,
già citata, a quattro ruote, di cui due motrici e sterzanti, come nelle
automobili.
in spazi
angusti. Diminuendo il numero di ruote a tre si rendono possibili movimenti
più ‘agili’, come la rotazione sul posto, pur mantenendo un buon grado di
stabilità; in I-Droid01, ad esempio, le tre ruote, poste ai vertici di un
triangolo ideale (vedi immagine in alto a destra), permettono al robot di
rimanere tranquillamente in equilibrio. La configurazione utilizzata da I-D01
rappresenta un’ottima scelta anche dal punto di vista della mobilità. Come
detto altre volte, infatti, essa prevede l’uso di due ruote motrici
controllate separatamente più una terza ruota passiva libera di girare: se le
velocità delle ruote motrici sono tra loro identiche e se anche il verso di
rotazione è coerente, il robot avanza (o indietreggia) lungo un percorso
rettilineo; se una ruota gira alla stessa velocità dell’altra, ma in senso
opposto, il robot ruota su se stesso. Tornando a un discorso più generale sui
robot, altre possibili configurazioni prevedono l’uso di tre ruote motrici e
sterzanti (cioè azionate da un primo motore che le fa ruotare e di un secondo
che le fa girare verso destra o sinistra) oppure (nella configurazione ‘a
triciclo’) di una ruota motrice e sterzante e di due passive, o ancora quella,
già citata, a quattro ruote, di cui due motrici e sterzanti, come nelle
automobili.
|
|
|
|
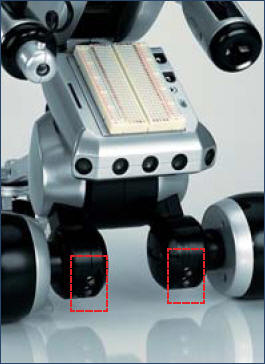
Con gli elementi allegati ai fascicoli 34, 35, 36, 37, 38, 39, 40 e 41 si possono iniziare le operazioni di montaggio Locomozione; in particolare è possibile installare i due LED ‘di posizione’, che troveranno posto nella parte inferiore e frontale del robot. Tali LED a luce bianca sono collegati a un unico circuito di controllo e potranno essere accesi e spenti solo contemporaneamente; dal circuito fuoriesce un cavo a due fili, che termina nel consueto connettore. Come sai, il moto della ruota sarà controllato grazie a un apposito encoder ottico, del tutto simile a quello usato per gli altri motori di I-D01.
|
|
|
|
|
|
Seguendo le istruzioni di montaggio, non ci sono particolari difficoltà per l'installazione degli ingranaggi del sistema di trasmissione, che devono essere opportunamente lubrificati con il grasso fornito,
|
|
|
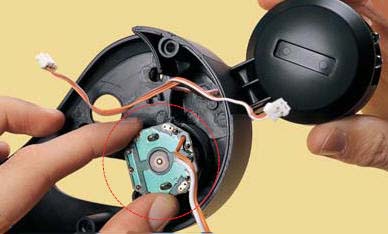
del motore e della cinghia di trasmissione,
|
|
|
e del ruotino posteriore.
|
|






|
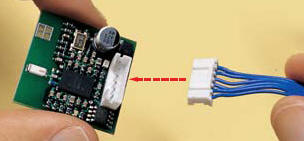
Il modulo di comunicazione Bluetooth. Con l’elemento allegato al fascicolo
42 si conclude la quarta fase di montaggio, quella che riguarda una
parte del sistema di locomozione di I-Droid01 e, soprattutto, il suo
modulo Bluetooth. La scheda elettronica allegata a questo fascicolo è il
cuore del sistema di comunicazione Bluetooth del robot: contiene il
processore che gestirà lo scambio di informazioni tra I-D01 e il
dispositivo collegato (PC o telefono cellulare compatibile), oltre al
connettore a sei pin che permetterà al modulo di essere alimentato
attraverso la Motherboard. Come tutte le altre schede elettroniche di
I-Droid01, anche questa va maneggiata con molta cura. In particolare
bisogna evitare attentamente ogni contatto quando è alimentata: fino a
quando non sarà installata nel corpo di I-D01, quindi, sarà opportuno
tenerla all’interno di una busta antistatica. |
|


Ecco come appare I-Droid01 al termine di questa fase
|
Software |
|