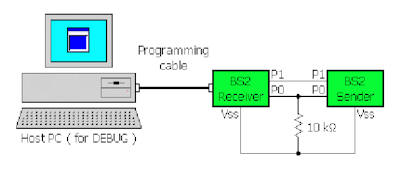
Collegamento di due BS2 e pc per la programmazione
MICROCONTROLLORI
L'originale era basato sul Basic Stamp BS2 della Parallax, ma inserire un secondo processore, e far dialogare i due processori tra loro per suddividersi i vari controlli e azioni del robot, è stata una sfida avvincente.
Collegamento di due BS2 e pc per la programmazione
|
BS2 |
BS2E |
||||||||||||||||||||||||||||||||||||||
|
Il 1' microcontrollore: il
microcontrollore utilizzato in questo robot è il
BASIC STAMP 2 (BS2) della Parallax, basato sul Microchip
PIC16C57C, che è il vero e proprio controllore, sul quale è stato
integrato l'interprete del linguaggio
PBASIC (Parallax Basic, un'estensione dei linguaggio BASIC
realizzata dalla Parallax).
|
Il 2' microcontrollore: il
microcontrollore utilizzato in questo robot è il
BASIC STAMP 2E (BS2E) della Parallax. E' basato sul Scenic SX28AC,
che è il vero e proprio controllore, sul quale è stato integrato
l'interprete del linguaggio
PBASIC (Parallax Basic, un'estensione dei linguaggio BASIC
realizzata dalla Parallax). Il
resto è simile al BS2.
|
||||||||||||||||||||||||||||||||||||||
| La memoria EEprom: La scheda DeA
Basic Stamp Board monta un chip di memoria EEPROM di 2048 byte di
capacità, per lo sviluppo del programma, non espandibili. Il modello utilizzato è il 24LC16B prodotto dalla Microchip |
La memoria EEprom che utilizza il BS2E è un chip di memoria EEPROM di 16 Kbyte di capacità, divisa in 8 banchi di 2 kbyte ciascuno; Il modello utilizzato è il 24LC128P. |
| Elenco revisioni | |
| 08-11-2005 | Aggiornamento pagina |