Encoders
Controllare il movimento effettivo delle ruote
è possibile solo tramite degli encoders applicati alle ruote stesse. Quindi mi
sono messo a progettare la parte hardware e la parte
software.
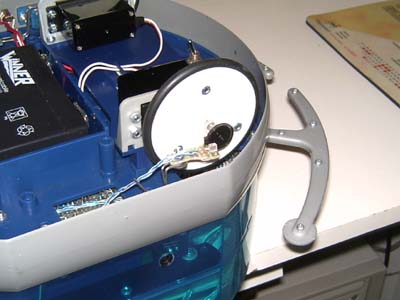
Per l'hardware ho cannibalizzato un mouse per recuperare le parti meccaniche
necessarie e le ho adattate alle mie esigenze.
Come software sono chiaramente legato al PBasic e come
processore al BS2E o BS2 della Parallax.
Il BS2E non è abbastanza veloce per gestire direttamente i segnali provenienti dai due emitter, uno per ciascuna ruota, per cui ho provveduto a costruire dei contatori hardware, di 8 bits (utilizzando 2 cip 74hc191) per ciascun emitter. I contatori vengono incrementati o decrementati a seconda del movimento in avanti o indietro delle ruote e vengono letti a tempi determinati (vedremo più avanti) dal BS2 tramite il cip 74hc165.
Sempre per motivi di tempificazione un BS2 (lo sleave) viene dedicato, quasi esclusivamente alla lettura degli emitter ad intervalli regolari, ed al calcolo della posizione attuale. Su richiesta del BS2E master può inviare a quest'ultimo le letture degli emitter e la posizione attuale. Il calcolo della direzione ottimale da intraprendere per raggiungere la destinazione viene fatta dal master.
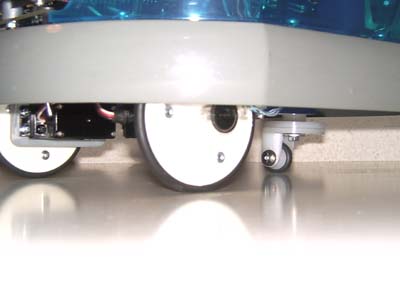
Vista della meccanica...

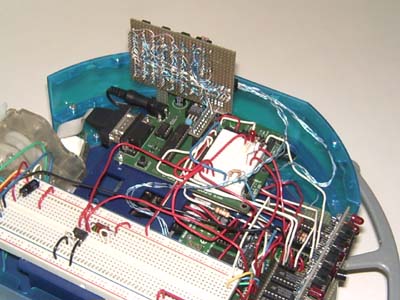
... e dell'elettronica.
Quì potete vedere lo schema della schedina degli encoders.
| Elenco revisioni | |
| 12-11-2005 | Revisione pagina |