|
Descrizione Eldo
Il piacere della robotica, non è solo
assemblare una scatola di montaggio, ma è ideare e sviluppare continuamente
nuove funzioni. Il robot originale DeA (vedere link
Robot DeA) è stato, da me, implementato in quasi tutte le sue
funzionalità base.
| |
panettone |
Eldo |
 | microprocessori Parallax BS2 |
|
1 |
1 |
| microprocessori Parallax BS2E |
|
- |
1 |
| servomotori per movimento |
|
2 |
2 |
| sensori infrarosso |
|
4 |
6 |
| sensori di contatto |
|
2 |
2 |
| sensori luce |
|
2 |
2 |
| sensore temperatura |
|
1 |
1 |
| sensore rumore |
|
1 |
1 |
| manipolatore a 4 movimenti |
|
1 |
1 |
| batterie ricaricabili |
|
- |
1 |
| telecomando |
|
1 |
1 |
| nutchip |
|
- |
1 |
| display esadecimali |
|
- |
2 |
| led display |
|
- |
8 |
| memoria programma |
|
2k |
2k+16k |
| ram |
|
32b |
32b+64b |
| memoria esterna dati |
|
- |
16k |
| espansione pin out |
|
- |
28 |
| espansione pin in |
|
- |
8 |
| encoders su ruote motrici |
|
- |
2 |
| breadboard |
|
2 |
2 |
| line follower |
|
1 |
1 |
| |
|
|
seguire i link sulla sinistra per i dettagli dei vari
dispositivi. |
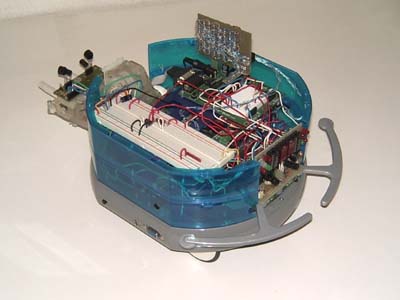
vista interna
|