 HOME
HOME
Capitolo N°11
Tratto dal libro:
"50 anni di attività
con la tecnica della
registrazione e riproduzione analogica"
INDICE del libro
BRACCI PER APPARECCHI FONOGRAFICI
Edgardo Magnaghi
Viene descritto quanto era necessario conoscere per progettare i bracci fonografici LESA e TELEFUNKEN con minima distorsione e che durante la riproduzione non danneggiassero il disco. Sono inoltre trattate le norme di costruzione che consentono di usare una minima forza di appoggio, fonte principale di errori concettuali
Il braccio di un sistema fonorivelatore deve in modo preciso e sicuro mantenere costante in qualsiasi posizione la forza di appoggio prefissata, ciò non in modo incerto o traballante e così condurre la puntina sul disco, nonostante la modulazione del solco, il più possibile orizzontalmente in direzione del raggio dello stesso disco. Il braccio deve inoltre sorreggere il sistema fonorivelatore senza permettere vibrazioni allo stesso o all’intero braccio che possano portare la puntina fuori dal solco. D’altronde esso deve spostarsi verso il centro del disco seguendo l’avanzamento del solco solo mediante la forza di appoggio senza esercitare alcuna forza aggiuntiva o trasmettere alcuna anomalia al sistema. Le difficoltà che si presentano in questa occasione sono ancora di natura geometrica e meccano-dinamica:
1. Problemi geometrici
1.1. Errore di tangenza
Come già descritto nel capitolo precedente, per soddisfare l’esigenza
di mantenere il sistema fonorivelatore sempre in posizione ortogonale
rispetto la tangente del solco durante tutto il suo percorso sul disco,
sarebbe necessaria la costruzione di un braccio molto complicato e dispendioso;
impresa che in LESA e in TELEFUNKEN non è stata ritenuta conveniente
affrontare. In generale i normali bracci sono supportati da due perni,
uno orizzontale e uno verticale che consentono al sistema fonorivelatore
di descrivere un arco di cerchio sopra il disco, dimensionato in modo
che possa mantenere sufficientemente piccolo l’errore di tangenza
in tutto il campo d’azione sullo stesso disco. Per ottenere ciò
occorre determinare la distanza tra il perno verticale del braccio e la
puntina di lettura “L” leggermente più grande della
distanza tra il perno verticale del braccio e il perno del piatto “d”
(la differenza viene comunemente denominata over-hang “D”)
in modo che il campo d’azione della puntina venga a trovarsi oltre
il punto centrale del disco. Inoltre occorre collocare il sistema fonorivelatore
su un gomito con inclinazione “b” rispetto l’asse di
lunghezza del braccio (Fig. 1).
L’angolo “a” tra il corrispondente raggio del solco
“R” e l’asse di lunghezza del braccio “L”
(Fig. 2) e il rispettivo angolo “g” = 90°-a tra la tangente
e l’asse di lunghezza del braccio “L”, si determinano
con la formula:

Con una conveniente scelta di “L” e “d”
si arriva quindi a determinare il valore di seno g e per ciò anche
il valore variabile di g tra il raggio del solco modulato esterno Re e
il raggio del solco modulato interno Ri.
L’errore di tangenza
varia da un valore esattamente uguale al valore dell’angolo
del gomito b posto all’interno e all’esterno di valori positivi.
Nel tratto intermedio tra i due punti zero è ammessa la presenza
di valori negativi (Fig. 3). Mediante la lunghezza del braccio (L più
grande) è possibile ridurre l’errore di tangenza d. Poiché
il fattore di distorsione secondo l’equazione (3) del precedente
capitolo [1] non dipende solo da d, ma anche da d/R, il valore dell’errore
di tangenza del settore esterno che sarebbe più grande deve invece
risultare equivalente al valore dei solchi interni.
La curva disegnata in Fig. 3 indica gli errori di tangenza e i fattori
di distorsione subordinati al raggio del solco R per il braccio “Spaziale”
Panta (ex LESA) di Fig. 4-5-6-7.
L’errore di tangenza si può rilevare sull’ordinata
mentre il fattore di distorsione (per la velocità V ^eff = 1 cm/s-1)
si può leggere a destra sulla numerazione posta sopra il fascio
di raggi: sul raggio R = 6.7 si rileva nel modo sopra indicato un errore
di tangenza d = -0.5° e un fattore di distorsione Krel = 0.05 % /
cm s-1.
Sul raggio R = 9.8 si rileva invece un errore di tangenza d = 0.8°
e un fattore di distorsione Krel = 0.06 % / cm s-1.
Fig. 6 Braccio tipo “SPAZIALE” – PANTA
Fig. 7 Giradischi RPH 280 con il braccio “SPAZIALE”
1.2. Forza centripeta di pattinamento (skating force) e relativa compensazione
La necessaria geometria del braccio precedentemente discussa ha purtroppo
un effetto secondario negativo: a causa dell’attrito tra disco e
puntina di lettura si genera sulla puntina stessa una forza di trazione
in direzione del solco non interamente assorbita dal supporto del braccio
ma che presentandosi con un angolo tra l’asse di lunghezza del braccio
“L” e la tangente del solco produce sul supporto del braccio
una coppia di rotazione tendente a trascinare il braccio verso il centro
del disco. La puntina quindi non può più lavorare normalmente
con una spinta simmetrica contro i fianchi del solco ma riceve una sensibile
spinta anomala verso il fianco interno del solco; di conseguenza il fianco
interno (sinistro) del solco risulterà fortemente usurato.
Nella Fig. 8 è rappresentato sommariamente un braccio Telefunken
posizionato su un disco e il diagramma delle forze che agiscono sull’estremità
della puntina.
“F” è la forza generata dall’attrito che ha una
direzione tangente al solco nel punto di contatto di questo con la puntina;
detta forza è il prodotto del coefficiente di attrito “K”
tra puntina e disco con la forza di appoggio “P” della puntina:
Questa forza “F” si scompone in una forza “V” che agisce in direzione del centro di rotazione del braccio che è quindi anche il supporto del braccio stesso e in una forza “S” di pattinamento che genera una coppia “C” di rotazione centripeta al braccio:
Dove “L” è la lunghezza totale efficace
del braccio e “g” è l’angolo tra l’asse
del braccio e la tangente del solco. La forza di appoggio “P”
della puntina sul solco del disco si scompone in due forze uguali contro
i fianchi del solco, PS = PD = 0.7 P(vedi Fig. 9). A causa della forza
di pattinamento (skating force), alla forza “P” si sostituisce
la forza “P1” e la forza della puntina contro il fianco destro
si riduce da “PD” a “PD1”.
I primi a rilevare questo fenomeno furono nel 1960 i tecnici della “Fairchild
Recording Equipement”; studiando un incisore stereo capace di registrare
segnali con velocità di incisione fino a 550 cm/sec., notarono
che a questi alti livelli la riproduzione del canale sinistro era perfetta
mentre comparivano distorsioni e difficoltà di linearità
sul canale destro. Applicarono allora al braccio riproduttore una forza
uguale e contraria alla forza di pattinamento (skating force) e riuscirono
così ad ottenere uguale aderenza della puntina sia sul fianco destro
che sul fianco sinistro. Gli effetti positivi sulla distorsione sono già
rilevabili, applicando il dispositivo anti-skating, con velocità
di incisione di 14 cm/sec. di picco a 1KHz e usando rivelatori di alta
qualità con forza di appoggio della puntina di 2 g.
La forza laterale “S”, ovvero la forza centripeta di pattinamento
(skating force) aumenta in modo lineare con l’aumento della forza
d’appoggio “P”. Normalmente nei bracci Hi-Fi la compensazione
viene effettuata creando una coppia antagonista (dispositivo anti-skating)
alla coppia di pattinamento regolabile separatamente dalla regolazione
della forza di appoggio, in alcuni apparecchi invece la compensazione
della skating force avviene automaticamente con la regolazione della forza
di appoggio. In altri casi è previsto un ulteriore mezzo di correzione
che tiene conto anche della forma della puntina causa di variazioni del
coefficiente d’attrito “K” e quindi della skating force.
Il coefficiente d’attrito “K” tra puntina e disco può
essere influenzato da diversi fattori, ad esempio:
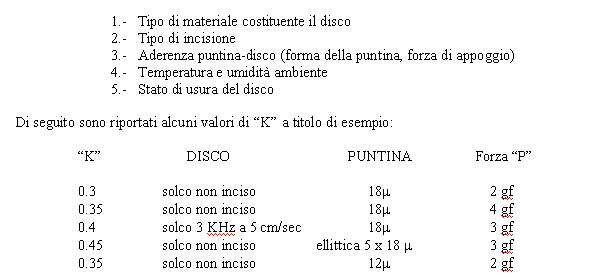
Stabilita la forza di appoggio della puntina a 2 gf con K = 0.3 avremo
una forza generata dall’attrito F = 0.6 gf; in questo caso la forza
di pattinamento varierà in funzione del raggio del solco a causa
della conseguente variazione dell’angolo g secondo la curva tracciata
in Fig. 10.
I dispositivi antipattinamento (anti-skating) dei giradischi TELEFUNKEN
mod. PS81DD-G90-TRS9000 erano a forza variabile per tutta la zona incisa
del disco; veniva così garantita una buona compensazione anche
nei solchi interni del disco. Gli stessi erano tarati per un coefficiente
di attrito K = 0.3 che rappresentava un buon compromesso tra le variazioni
che poteva avere la skating force (vedi Fig. 11). La forza antagonista
era applicata al braccio mediante un dispositivo elettromagnetico in modo
che durante l’avanzamento fornisse il valore voluto e escludesse
qualsiasi attrito meccanico (vedi Fig. 12-13-14).
2. Problemi meccanici di dinamica
2.1.Equilibratura del braccio
Il rivelatore non deve, quanto più possibile, reagire alle vibrazioni
che possono provenire dall’esterno, per esempio al rumore dei passi.
Per ottenere questa condizione occorre per prima cosa equilibrare il braccio
sui propri cardini ovvero sull’asse di rotazione orizzontale e sull’asse
di rotazione verticale. A ciò si provvede mediante l’applicazione
di un peso di compensazione (contrappeso). Nelle realizzazioni più
economiche è invece utilizzata una semplice molla di trazione con
la quale si crea anche la forza di appoggio e che offre il vantaggio di
avere un braccio estremamente leggero. Mediante questi accorgimenti non
solo si isola il sistema fonorivelatore dalla ricezione di eventuali vibrazioni
esterne tramite il piatto portadischi, ma si crea la condizione che anche
se l’apparecchio è posto su un piano non perfettamente orizzontale
non si pregiudica il procedimento di lettura.
2.2. Risonanze del braccio
Per attenuare le già menzionate risonanze del braccio si ricorre
frequentemente ad interporre elementi elastici nel fissaggio del contrappeso
che contribuiscono con la sospensione elastica della puntina a riportare
le risonanze disturbanti, causate da vibrazioni torsionali oppure a flessione
del braccio, che possono apparire nella risposta di frequenza, in valori
inferiori al minimo del campo di trascrizione. La necessità di
rigidità alla flessione e di leggerezza può essere risolta,
per esempio, con la realizzazione di bracci tubolari.
2.3. Supporto del braccio
I più importanti requisiti del supporto del braccio che possono
influire sulla fedeltà della riproduzione sono: consentire sempre
un preciso appoggio sul disco senza incertezze causate da difettoso montaggio
o inammissibile riscaldamento e senza generare vibrazioni verticali. Qualora
in un giradischi, il perno del braccio per il movimento verticale producesse
vibrazioni verticali sulla superficie del disco, la cui componente cinetica
nella direzione longitudinale del solco acustico causa deviazioni in altezza
del suono, si verificherebbe anche una inopportuna usura del disco stesso.
Per non generare vibrazioni verticali, nei giradischi, i due perni di
supporto devono essere collocati in una ben determinata posizione elevata
rispetto la superficie del disco, nei cambiadischi questa condizione può
essere realizzata solo su una determinata altezza della pila di dischi
così che nei medesimi possono evidenziarsi leggeri disturbi acustici
causati appunto da vibrazioni verticali sul disco.
La già descritta forza centripeta di pattinamento (skating force)
è di circa il 10% della corrispondente forza di appoggio. L’attrito
supporto-braccio si ripercuote sullo svolgimento della lettura nel medesimo
senso con leggere vibrazioni laterali però con mutevoli effetti.
Anche se in modo non completo, come nel caso della compensazione antiskating,
è possibile attenuare l’attrito del braccio con semplici
cuscinetti a sfere oppure con bussole antifrizione. Perché il dispositivo
antiskating funzioni perfettamente e senza produrre disturbi, occorre
però che l’attrito supporto-braccio risulti sulla puntina
di lettura con valore molto inferiore a quello della forza antiskating,
quindi circa l’1% della forza di appoggio utilizzata dai sistemi
fonorivelatori e cioè da 10 a 50 mg.
Per le sopra citate ragioni, la costruzione del supporto del braccio richiede
esperienza nel progetto e meccanica di precisione nella costruzione.
3. Braccio “dell’astronomo” con errore di tangenza “zero”
Come precedentemente ricordato, per eliminare la possibilità di
distorsione dovuta a errori angolari (errore di tangenza) è necessario
che il braccio, ovvero il rivelatore, avanzi verso il centro del disco
mantenendo costantemente l’ortogonalità rispetto la tangente
del solco. Nel 1974, uno scienziato dell’Osservatorio Astronomico
di Roma, il Prof. G. Caprioli, basandosi sulle leggi della geometria piana,
ideò e brevettò un braccio che pur essendo di struttura
relativamente semplice, possedeva questi requisiti.
Il braccio era costituito essenzialmente da un meccanismo con due pulegge
aventi diametri in rapporto 2 : 1, in grado di impartire alla cartuccia
di lettura, opportunamente fissata solidamente alla maggiore di esse,
una rotazione compensatrice di quella del braccio nel suo complesso attorno
alla minore, tale da mantenere costante l’angolo fra la mezzeria
longitudinale della cartuccia e la tangente alla direttrice del solco
nel punto di lettura; in particolare nullo per opportuna regolazione delle
parti, al fine di conseguire un tracciamento tangenziale che, rispettando
le condizioni realizzate all’atto dell’incisione della matrice
del disco, ne rendeva possibile la riproduzione esente da distorsione.
Abbiamo potuto osservare che durante il funzionamento di un giradischi
munito di un convenzionale braccio imperniato rigido, l’angolo formato
dalla mezzeria longitudinale della cartuccia di lettura con la tangente
alla direttrice del solco nel punto di contatto con la puntina dello stilo
varia continuamente, mentre, per rispettare le condizioni realizzate all’atto
dell’incisione della matrice del disco e pertanto evitare distorsioni
nella riproduzione del segnale, esso dovrebbe risultare costantemente
nullo. Con un braccio di adeguata lunghezza ed opportuna configurazione
si ottiene generalmente l’annullamento di tale angolo in corrispondenza
di due punti della zona utile del disco (vedi Fig. 3), mantenendone altrove
entro qualche grado il valore massimo.
Per una più radicale riduzione dell’errore di tangenza sono
stati realizzati bracci non imperniati nei quali la puntina veniva condotta
radialmente da una guida rettilinea mediante un asservimento atto a vincere
le forze d’inerzia e d’attrito, evitando altrimenti una inaccettabile
usura della puntina e del disco (Rabco, Bang & Olufsen); oppure bracci
imperniati aventi una struttura a pantografo per l’opportuna variazione
dell’assetto della cartuccia nel corso della lettura (Garrard, Van
Rps). Ma l’approssimazione intrinseca nella progettazione del pantografo
comportavano solo una limitata correzione dell’errore di tangenza,
nonostante la notevole complessità dei dispositivi, la presenza
di ulteriori punti di attrito e il costo elevato.
Il braccio “dell’astronomo” proponeva un dispositivo
che, utilizzando un differente organo cinematico di più semplice
realizzazione, consentiva l’esatto e costante annullamento dell’errore
di tangenza e richiedeva la presenza di un solo perno addizionale rispetto
al braccio convenzionale del quale avrebbe potuto conservare la maneggevolezza
e la versatilità.
Inoltre, dato che la correzione esatta dell’errore di tangenza risultava,
in tale dispositivo, indipendente dalla lunghezza del braccio, questa
avrebbe potuto essere sensibilmente inferiore a quella di un braccio convenzionale
di alta qualità; risultando conseguentemente minore il momento
d’inerzia complessivo e pertanto più rapido l’adattamento
alle sollecitazioni dovute alle ondulazioni ed alla eccentricità
del disco, tendenti altrimenti a produrre il distacco della puntina dal
solco.
Infine, la simmetria del posizionamento della cartuccia nel dispositivo,
rendeva superflui quegli accorgimenti che dovevano essere adottati in
un braccio convenzionale di qualità per assicurare il bilanciamento
laterale necessario affinché non risultasse critico il livellamento
del giradischi.
La Fig. 15, illustra il principio geometrico del dispositivo sul piano
del disco dove O è l’asse di rotazione del disco e P è
l’asse di rotazione azimutale del braccio. Questo ha lunghezza tale
che risulta uguale a PO la distanza b e la puntina, allorché questa
sia appoggiata sul disco nella generica posizione Q definita dall’angolo
a . La tangente t in Q alla direttrice del solco d , esattamente coincidente
con la circonferenza di centro O per Q , forma l’angolo b con la
direzione PQ . Poiché il triangolo OPQ è un triangolo isoscele,
risulta : b = a / 2
La Fig. 16 illustra, su un piano superiore parallelo al piano del disco,
il principio cinematico del dispositivo nelle condizioni di lavoro. La
puleggia p è fissata con centro p’ sull’asse di rotazione
azimutale del braccio. La puleggia q di diametro doppio, è imperniata
e libera di ruotare, all’estremità del braccio, a distanza
P’O’ = PO da P’ , attorno ad un asse Q’ che risulta
perpendicolare al piano del disco. Una cinghia c collega direttamente
le due pulegge con vincolo di puro rotolamento. In tali condizioni una
rotazione azimutale del braccio provoca la contemporanea rotazione, per
un angolo esattamente metà, della puleggia q attorno al suo asse.
Pertanto se la cartuccia è fissata solidamente a tale puleggia
in modo che la puntina si trovi sull’asse di rotazione di essa,
la sua mezzeria longitudinale indicata con a si manterrà costantemente
parallela alla tangente della sottostante direttrice del solco nel punto
di contatto, se tale era, ad esempio come in Fig. 16 , per a = 0 .
Le Fig. 17a 17b rappresentano in vista dall’alto e laterale una
schematica realizzazione del dispositivo nelle sue parti essenziali. Una
asta rigida A costituisce il braccio e sostiene le due pulegge p e q ad
essa imperniate con gli assi f e g , nonché un contrappeso B .
L’asse g è contemporaneamente l’asse della rotazione
azimutale del braccio e ad esso è materialmente solidale la puleggia
p . La cartuccia di lettura E è fissata ad una piastrina D solidale
alla puleggia q , in modo che la puntina dello stilo di lettura S si trovi
sull’asse f . La cinghia è rappresentata da un filo c mantenuto
in tensione costante da una molla elicoidale m inserita lungo uno dei
tratti liberi, che ha anche la funzione di ridurre il gioco dei perni
alle estremità del braccio.
Onde evitarne lo scorrimento, il filo poteva essere ancorato a ciascuna
puleggia in un punto della superficie laterale non interessato al funzionamento,
per esempio mediante stringimento sotto la testa di una vite radiale,
da effettuarsi all’atto della regolazione iniziale per l’annullamento
dell’errore di tangenza.
Le pulegge potevano essere realizzate in materia plastica infatti una
tolleranza di 0,03 mm sul diametro comporta un valore massimo dell’errore
di tangenza non superiore ad 1’. La costruzione del dispositivo
era compatibile con diverse realizzazioni dell’asse di rotazione
fisso del braccio. Nel caso di una realizzazione ad asse azimutale fisso,
l’asse zenitale doveva però giacere nel piano medio dell’avvolgimento
della cinghia attorno alla puleggia fissa perché risultino minime
le rotazioni indesiderate della cartuccia per le oscillazioni del braccio
dovute ad eventuali ondulazioni del disco.
Il perno della puleggia alla quale è solidale la cartuccia costituisce
l’unico ulteriore punto di attrito rispetto ad un braccio convenzionale
e si sarebbe pertanto dovuto realizzare con elementi meccanici di adeguata
qualità e precisione. E’ da rilevare comunque la favorevole
riduzione operata dal meccanismo a pulegge nel riportare la relativa coppia
d’attrito all’asse azimutale ove la stessa viene contrastata
da quella delle forze attive fornite, durante la rotazione del disco,
dalla spiralizzazione della direttrice del solco e dalla componente radiale
dell’attrito sulla puntina (skating force) ed applicate, attraverso
questa, all’estremità del braccio.
Tutto quanto sopra descritto era allettante, teoricamente era tutto esatto;
ma le prove eseguite sul prototipo nei laboratori della LESA rilevarono,
Fig. 18, che l’attrito generato sui perni durante l’avanzamento
del braccio verso il centro del disco causava una eccessiva forza antagonista
con conseguente spinta anomala della puntina verso il fianco esterno del
solco. Questo difetto, impossibile da eliminare, evidenziava anche un
diverso livello di segnale tra il canale destro e il canale sinistro.
Anche se riconosciuta come idea geniale, il braccio “dell’astronomo”
non è mai stato presentato sul mercato.
Fig. 18 Braccio “dell’astronomo”
Registrazione grafica della curva di risposta con peso puntina = 2 gr
LETTERATURA
[1] W. Wegner : Sperciale problematica per la lettura del disco. (TFK
1969)