|
Intro
L'e-Focus è un focheggiatore
elettrico, per telescopi, autocostruito.
Ora con la funzione di autofocus!

Il progetto nasce in seguito ai
primi tentativi di fotografia digitale, al fuoco diretto, con una webcam.
Infatti, una volta trovata la "zona del fuoco" (cioè quella zona in cui
l'oggetto si trova abbastanza a fuoco, a meno di piccole correzioni),
risulta molto lungo e difficile trovare il punto di focheggiatura esatto (o
quasi!).
Il principale problema è dato dal
tipo di focheggiatore utilizzato: è sufficiente sfiorare la manopola per
distruggere tutto il lavoro di messa a fuoco fatto sino ad allora. Altro
problema sono le vibrazioni dello strumento. Infatti, ogni volta che si va a
toccare la manopola del fuoco, bisogna successivamente lasciare 3-4 secondi
di tempo, affinchè lo strumento smorzi le vibrazioni.
Quanto illustrato sino ad ora
significa(va):
- "circa-focheggiare", cioè
trovare la "zona del fuoco";
- far assestare lo strumento;
- aggiustare il tiro, effettuando piccole correzioni;
- far assestare lo strumento;
- si... il fuoco sembra ok, ma... aspetta che sposto ancora un
pochino;
- far assestare lo strumento;
- acc...!! sono andato oltre. Torno un po' indietro;
- far assestare lo strumento;
- di nuovo: si, mi sembra ok, ma...
- far assestare lo strumento;
- nooo, troppo, troppo!!
- far assestare lo strumento;
- forse ci sono;
- far assestare lo strumento;
- ancora un micro-giro della manopola...
- far assestare lo strumento;
- ECCOLO!!!!
Se va bene, i passaggi sono "solo"
17, ma, se va male, si impiegano anche 10-15 minuti... Se poi, inoltre, si
pensa che le pose di messa a fuoco durano 3-4 secondi mediamente (per il
cielo profondo)... ...Ecco da dove nasce la necessità del
focheggiatore motorizzato! Un altro importantissimo fattore è la possibilità
di stare vicino allo schermo del pc, così da riuscire a controllare bene le
immagini di messa a fuoco.
Le principali caratteristiche
sono:
- controllo fine della
posizione (step by step);
- autofocus;
- 10 differenti velocità;
- 10 posizioni memorizzabili;
- controllo di fine corsa;
- Azzeramento posizione in un
qualsiasi punto.
Ed ecco il telecomando in tutto il
suo "splendore" (si fa per dire). Costruzione molto spartana, ma funziona!
Si nota il velcro utilizzato per appendere il telecomando alla montatura...
 
Non è stata prevista
la gestione del backslash (memoria del PIC esaurita), infatti questo crea
qualche piccolo problema, ma nulla di insormontabile. Personalmente, ho
risolto la cosa con un accorgimento meccanico (foto qui sotto: è una "U"
che mantiene in tensione l'albero del motore, evitando un gioco
fastidiosissimo, in su o in giù, dell'albero stesso).

E' disponibile una versione,
per PIC 16F84A, che non prevede il display LCD;
prevede 3 posizioni in
memoria, due diverse velocità, quattro led e quattro
pulsanti. Lo schema elettrico di base è a cura di Riccardo
Ricci ed è relativo al controllo del moto di AR per una
montature equatoriale.
 Download e-Focus v1.0
Download e-Focus v1.0 Ma dopo questa lunga e noiosa
premessa procedo alla descrizione tecnica del progetto. Se ci fossero
indicazioni suggerimenti, consigli, ecc, ecc, vi prego di
contattarmi.
Invito alla lettura COMPLETA di
quanto scritto di seguito.
Parte elettrica
Il circuito elettrico è molto
semplice. Può probabilmente essere migliorato, ma assolve pienamente al
compito per cui è stato pensato e non ha mai dato problemi in circa un anno
di utilizzo.
Nella foto è mostrato il telecomando
aperto; ho un'altra idea di circuito "fatto bene", ma, mi ripeto, funziona
senza problemi.
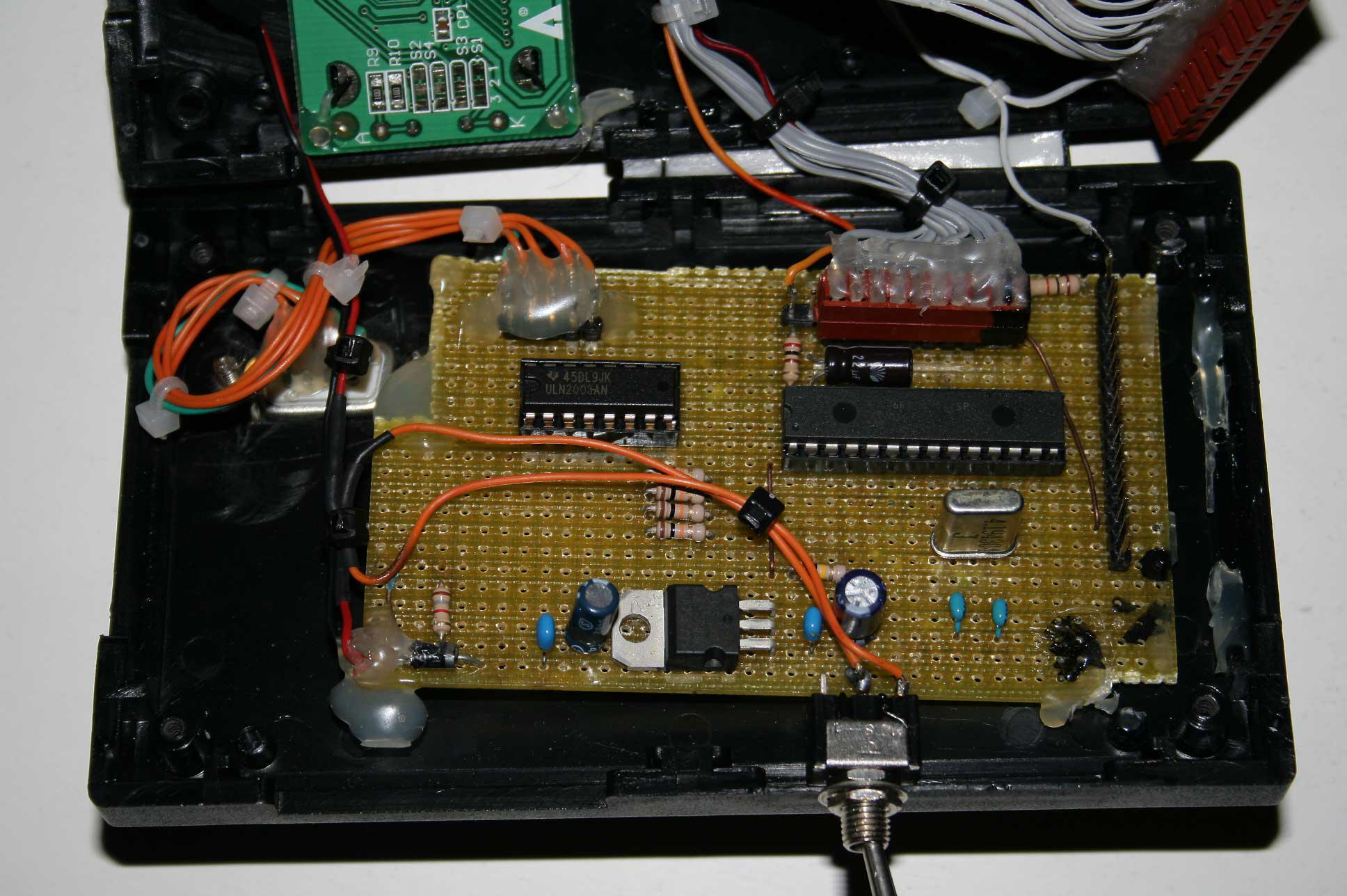

Il cuore del sistema è un PIC 16F876A
che ha il compito di controllare il motore, ricevere input da tastiera e
comandare il display LCD.
La tastiera ha 5 pulsanti che
permettono di navigare all'interno dei vari menù e di muovere il motore
passo-passo collegato al focheggiatore.
Il display LCD è un classico 16x2 con
standard di comunicazione Hitachi.
Il motore passo passo è ricavato da
una stampante, ma i dettagli sono illustrati più sotto.
Infine, il componente secondo per
ordine di importanza è l'integrato ULN2003A della Texas Instruments. Questo
è un array di 7 darlington che necessita di pochissimi componenti esterni e permette il
controllo diretto del motore, disaccoppiando, di fatto, il PIC dal motore
stesso.
Una seconda scheda,
accoppiata ad all'integrato MAX232, permette di aggiungere
la funzione di autofocus.
Cliccando qui sotto è possibile
scaricare lo schema elettrico, il firmware per il PIC e la lista componenti.
Attenzione:
-
i firmware sono
compilati per due frequenze dell'oscillatore (4MHz o
20MHz); a voi la scelta.
-
In sede di programmazione (utilizzando il PIC
16F876A ed ICPROG), è necessario disabilitare il "CP",
ovvero "Code Protect", in quanto sono stati riscontrati
problemi.
-
Una volta acceso l'e-Focus, se tutto è
andato per il meglio, è necessario fare un "Erase
memory",
per pulire la memoria da eventuali valori casuali che vi
possono essere immagazzinati. N.B.: questa operazione va
fatta solo una volta, subito dopo aver programmato il
PIC, ed è bene ripeterla ogni volta che il PIC viene
programmato.
Download
e-Focus v2.0
Ringrazio Armando per avermi mandato una sua versione
del PCB.
verrà
probabilmente realizzata una versione SMD del circuito, così da ridurre peso
e dimensioni della pulsantiera.
Spendo un paio di
parole sui file contenuti nel download qui sopra:
-
il file pdf
contiene tre diversi schemi. Il primo è la scheda madre
di tutto il sistema, ed è quella che effettivamente
controlla i pulsanti, il motore ed il display. Questo
schema è sufficiente per chi non voglia l'autofocus;
-
il secondo schema
è riferito ad una scheda aggiuntiva che serve, appunto,
per aggiungere la funzione di messa a fuoco automatica
tramite protocollo LX200;
-
il terzo schema,
infine, è riferito ad un classico MAX232, necessario per
collegare la porta seriale con la scheda al punto
precedente.
-
Sono presenti due
ulteriori pdf, con i PCB relativi alla scheda madre
(grazie Armando!).
-
Tenere
presente, per l'incisione, che la scritta sul pcb
,quando si piazza il master per la fotoincisione,
affinché sia messa dal lato giusto, deve essere
leggibile.
Il master sulla piastra ramata deve essere messo in modo
che la scritta sia leggibile.
Si è scelto di
utilizzare il 16F876A come interfaccia LX200. Questo a causa
di problemi di comunicazione tra pc ed il precedente
16F628A. Lo svantaggio di questa configurazione è, in
effetti, il grande spreco di pin.
Firmware ed istruzioni
Non viene pubblicato il codice
sorgente del firmware, ma sarò ben lieto di fornire, a chi ne faccia
richiesta, tutti i dettagli del caso.
La pulsantiera si compone di 6
pulsantini e di un led rosso. I pulsanti "Destra" e "Sinistra" permettono di
scorrere le voci dei vari menù e sottomenù. Il pulsante centrale seleziona
le voci e permette di accedere alla voce scelta. Il pulsante in basso a
destra è il pulsante "Cancella" e permette di uscire dal sottomenù e di
tornare al menù precedente. Infine, i pulsanti "Su" e "Giù" permettono di
muovere il motore.
Sulla prima riga del display sono
mostrate le voci, i messaggi, i parametri ecc..., mentre sulla seconda riga
sono mostrati i pulsanti attivi, cioè quelli che possono essere premuti:
-
ENT ---> Enter, pulsante centrale;
-
L ---> Left, pulsante di sinistra;
-
R ---> Right, pulsante di destra;
-
Up ---> Su, pulsante in alto;
-
Down ---> Giù, pulsante in basso;
-
CLR ---> Cancella, pulsante in basso a sinistra.
Il led rosso serve ad
indicare quando il focheggiatore ha raggiunto il fondo corsa (viene
visualizzato anche un messaggio sul display), oppure indica che il PIC è
occupato a scrivere o a leggere la EEPROM interna, sulla quale è memorizzata
la posizione del focheggiatore.
E' stata aggiunta una voce nel menù d
setup che permette di impostare il valore massimo di fine
corsa, rendendo il sistema personalizzabile. Tale valore,
per il mio accoppiamento motore-ingranaggi, è di 1420. Per
impostare un valore personalizzato è sufficiente mandare il
focheggiatore a fondo corsa e leggere il valore in questione
nel menù "Show position". Quindi, impostare la cifra
desiderata nel menù "Set max" e premere Enter per
confermare.
In questo menù è ora possibile
scorrere velocemente i valori del fine corsa (da 0 a
10000000), tenendo premuto il relativo tasto:
Parte meccanica
Non mi dilungo nella
descrizione della parte meccanica, in quanto è un lato del progetto che
dipende dal telescopio utilizzato.
Il motore che ho
utilizzato è stato recuperato da una stampante HP rotta; è un motore
unipolare pilotato in modalità Half-Step, così da ridurre le vibrazioni e da
aumentare la precisione. E' chiaro che, in questa maniera, diminuisce anche
la coppia fornita. Tuttavia, ho fatto alcune prove e, a basse velocità, il
motore riesce a sollevare carichi considerevoli: circa 3-4 kg.
Allego solo un paio
di fotografie che mostrano il motore nella sua sede. Semplicemente, il
motorino è avvitato alla scatola di plastica nera che, al suo interno, è
rinforzata da pezzi di legno. Questo accorgimento è pensato in modo da
evitare flessioni della scatola, che possono provocare giochi molto
fastidiosi.


Con pochi euro di
spesa ho ottenuto uno strumento piuttosto valido ed adattabile a quasi tutte
le esigenze. Voglio ringraziare
Antonio e Fabio che mi hanno segnalato alcuni bug e mi
hanno dato suggerimenti su come migliorare il firmware.
Ringrazio Armando per il PCB ed ancora Antonio per aver
testato l'autofocus...
Pagina con le foto dei telecomandi
realizzati da chi ha intrapreso la costruzione.
|
 |