Si tratta di un piccolo computer basato su di un
microcontroller potente, idoneo all'uso con piccoli robot amatoriali, il sistema è
facilmente espandibile.
La
scheda Roboboard nasce per risolvere tutti quei problemi di
piccola automazione ed acquisizione dati dove sarebbe necessario sviluppare dei sistemi
hard-soft dedicati. La scheda può essere programmata usando 3 linguaggi diversi,
l'assembler, il Pic Basic Pro e il C.
Applicazioni ideali della Roboboard
sono piccoli robot, movimentazioni per telescopi, macchine CNC, telecomandi intelligenti,
acquisizione dati da sensori di varia natura con possibilità di elaborarli e comandare
dei dispositivi attuatori di conseguenza.
La Roboboard dimostra tutta la sua
versatilità se viene utilizzata come periferica intelligente da abbinare a un PC o ad
altre schede CPU di classe maggiore. Per esempio è possibile delegare alla Roboboard
il controllo tramite un algoritmo PID di due servomotori con la possibilità di far loro
eseguire movimenti molto complessi tra loro correlati.
La presenza di un bus I2C garantisce una facile interfacciabilità con altre schede in un
network a media velocità (fino a 400 kpbs), pertanto è possibile anche far dialogare tra
loro più Roboboard al fine di creare una sofisticata rete di controllo
pluriattuatore senza impegnare eccessivamente le risorse della cpu principale.
Abbinando alla Roboboard cpu il ponte ad H potete realizzare un robot con
trazione a due ruote dotato di tutti i sensori che volete senza problemi. Se poi volete
comandare anche degli arti o un'unità pan tilt per i sensori basta mettere il serial
servo controller e avete la possibilità di far muovere fino a 8 servocomandi RC.
|
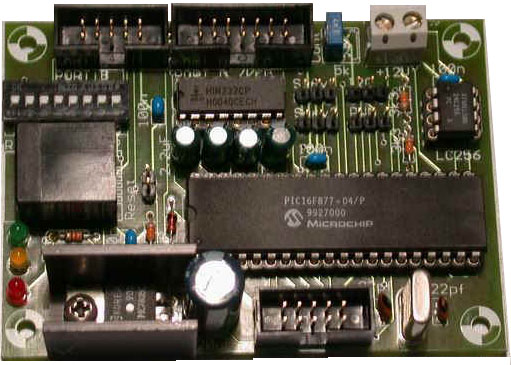
Caratteristiche tecniche:
- Processore PIC 16F877 a 20MHz;
- Memoria esterna EEPROM fino a 64Kbyte (24C512);
- Fino a 8 linee d’ingresso Analogiche (0-5 Volt) a 10 bit 100ksample/sec;
- Fino a 33 linee I/O digitali;
- Comunicazione via RS232 e bus I2C con funzionamento anche in multimaster;
- Connettore dedicato per il collegamento di un display lcd alfanumerico;
- Due uscite PWM con risoluzione a 10 bit e carrier fino a 100 kHz;
- Due uscite dedicate per controllo servomotori;
- Dimensioni ridotte (8*6 cm);
- Assorbimento elettrico in standby minore di 5 mA;
- Alta velocità di esecuzione dei programmi, fino a 5 mips;
- Programmabilità tramite ICP (solo 3 fili);
- Otto dip switch permettono, se necessario, di impostare dei parametri definibili
dall’utente;
- Tutti i pin di I/O del processore sono riportati su 3 distinti connettori DIL;
- inoltre sono presenti connettori dedicati per collegare due servocomandi, per le
due uscite PWM, per il bus I2C, per la seriale RS232 e l'ICP;
- L'uso del pilotaggio PWM non pregiudica l'utilizzo delle due uscite per i
servocomandi e viceversa;
- Programmazione del processore tramite ICP oppure smontandolo dal suo zoccolo e
mettendolo direttamente sul programmatore.
|
|
