Controllo qualitý di un farmaco
ITEC - Sistemi Automatici - 2015
SECONDA PARTE
1.
In relazione allo schema sviluppato nella prima parte si progetti l'interfaccia HW tra il sensore Sc e il sistema programmabile scegliendo un dispositivo di conversione A/D che garantisca un errore massimo di misura rilevata pari ad 1 ug/ml; inoltre si modifichi il software di gestione in modo da calcolare, al termine del processo, il valore medio di concentrazione ottenuto nelle prove ed il numero di prove in cui tale
concentrazione Ë inferiore a 500 ug/ml.
2.
In relazione allo schema sviluppato nella prima parte si proponga una soluzione atta a rilevare il
malfunzionamento del sensore SPH. In particolare, nel caso in cui tale dispositivo fornisca in uscita i valori 0HEX oppure FHEX, il sistema deve provvedere all'accensione di un led di segnalazione, i dati memorizzati fino a quel momento devono essere annullati ed il processo dev'essere sospeso per riprendere dopo il reset di sistema.
3.
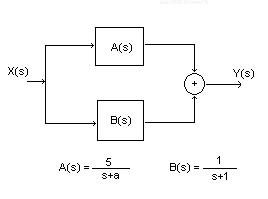
Dalle prove effettuate su un sistema continuo opportunamente sollecitato, si Ë ottenuto il modello
rappresentato in figura:
Dopo aver ricavato la funzione di trasferimento complessiva, si determini il valore di a>0 per il quale la risposta a regime y(t) del sistema sottoposto a sollecitazione u(t) gradino unitario abbia valore 6.
Si proponga un esempio reale al quale possa corrispondere il modello dato.
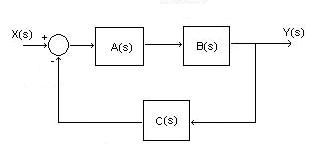
Si determini la funzione di trasferimento complessiva del sistema e si calcoli il margine di fase e di guadagno del sistema ad anello aperto nel caso in cui K=50. Per quale campo di variazione di K il sistema risulta stabile?
/---------------------------------/
1.
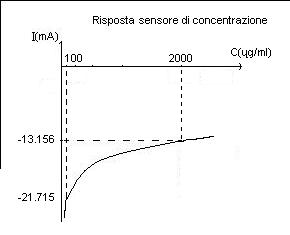
Interfaccia sensore di concentrazione
L'andamento in uscita del sensore di concentrazione Ë il seguente:
dal quale possiamo notare che per valori bassi di concentrazione la sensibilitý Ë maggiore rispetto agli altri valori, quindi per garantire un errore massimo di 1 ug/ml si deve considerare la variazione di corrente dove c'Ë meno sensibilitý e cioË:
Siccome l'escursione in corrente del sensore DI per le misure assegnate Ë:
DI=I(2000)-I(100)=-13.156mA-(-21.715mA)=8.559mA
per apprezzare l'errore suddetto si dovrý cosÏ quantizzare:
Nq= DI/DminI(C)=8.559mA/1uA=8559 = 100000101101111 bin
(14 bit)
dove Nq Ë il numero di quanti relativi alla corrente.
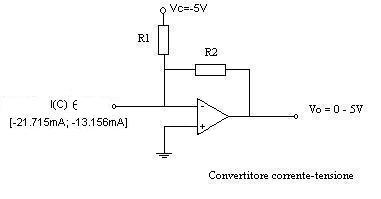
Per quanto detto il convertitore A/D idoneo dovrý avere un'uscita a 14 bit e supponendo che ammetta in ingresso un segnale con ampiezza DV da 0 a 5V, un possibile circuito di condizionamento Ë:
Vo=dV/dI*(I-Imin)=5V/8.559mA*(I-(-21.715mA))=0.584*10^3*(I+21.715*10^(-3))=584*I+12.685
Supponendo che Vc=5V Vo=R2*I+R2/R1*Vc=R2*I+5*R2/R1
Sostituendo Vo si ha: 584*I+12.685=R2*I+5*R2/R1 ==> R2=584 Ohm; R1=12.685/5*R2=2.537*584=1482 Ohm
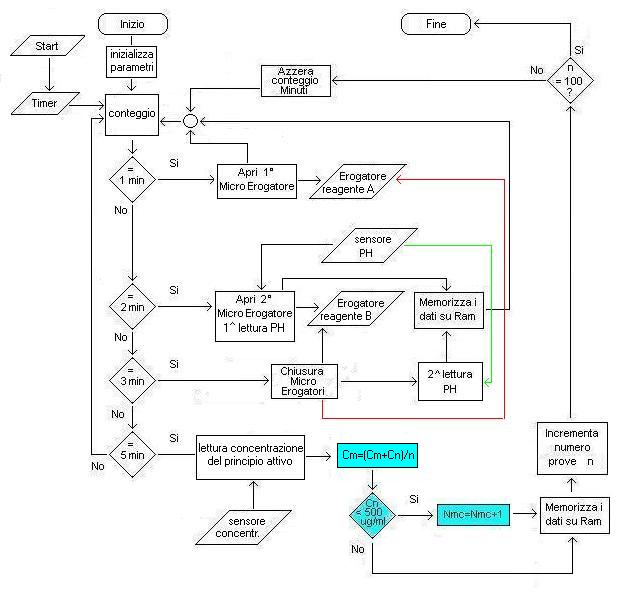
Il valor medio di concentrazione Ë: Cm = (C1+C2+.....+Cn)/n con n uguale al numero di prove effettuate.
Si indica con Nmc il numero di prove in cui tale concentrazione risulta minore di 500ug/ml.
Il programma di gestione, allora, Ë cosÏ modificato (in celeste):
2.
Rilevazione errori e reset del sistema
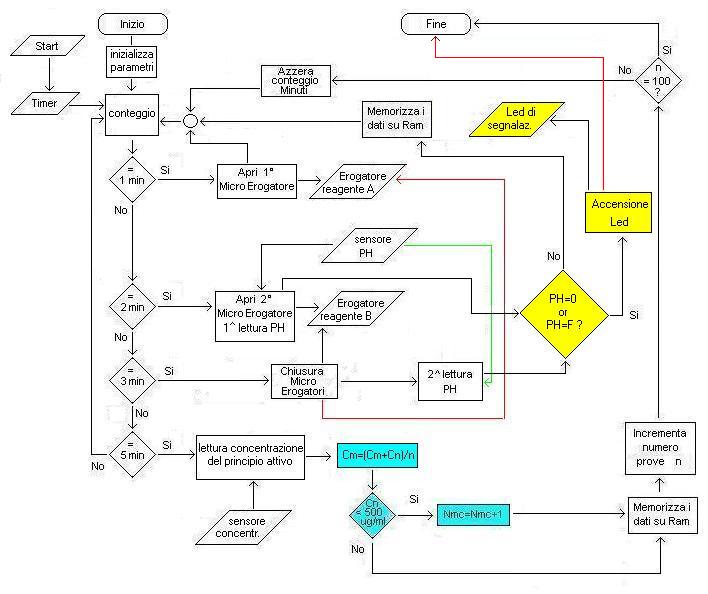
La soluzione adottata (evidenziata in giallo) in caso d'errore, prevede il pi˘ sicuro riavvio manuale:
Dalla figura si osserva che, se la lettura del PH restituisce i valori d'errore, si accende il led di segnalazione ed il processo ha termine, quindi, la pressione del pulsante "Start", dopo aver reinizializzato i parametri, dý inizio ad un nuovo ciclo.
3.
Risposta di un sistema sottoposto a sollecitazione
La funzione di trasferimento complessiva Ë: Y(s)= X(s)*[A(s)+B(s)]
La trasformata del gradino unitario u(t) Ë X(s)=1/s quindi risulta:
La risposta a regime la calcoliamo con il teorema del valor finale:
si ha:
4.
Analisi di stabilitý del sistema
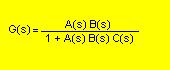
La funzione di trasferimento complessiva Ë:
====>
Calcoliamo ora il margine di guadagno e di fase del sistema ad anello aperto per K=50.
La funzione di trasferimento ad anello aperto Ë:
Per tracciare il diagramma asintotico di Bode, riscriveremo tale funzione nel seguente modo:
(4.1)
Si determinano i seguenti poli: P1=0; P2=P3=P4=-2 e si puÚ subito dedurre che, per il criterio generale di stabilitý, il sistema Ë stabile semplicemente.
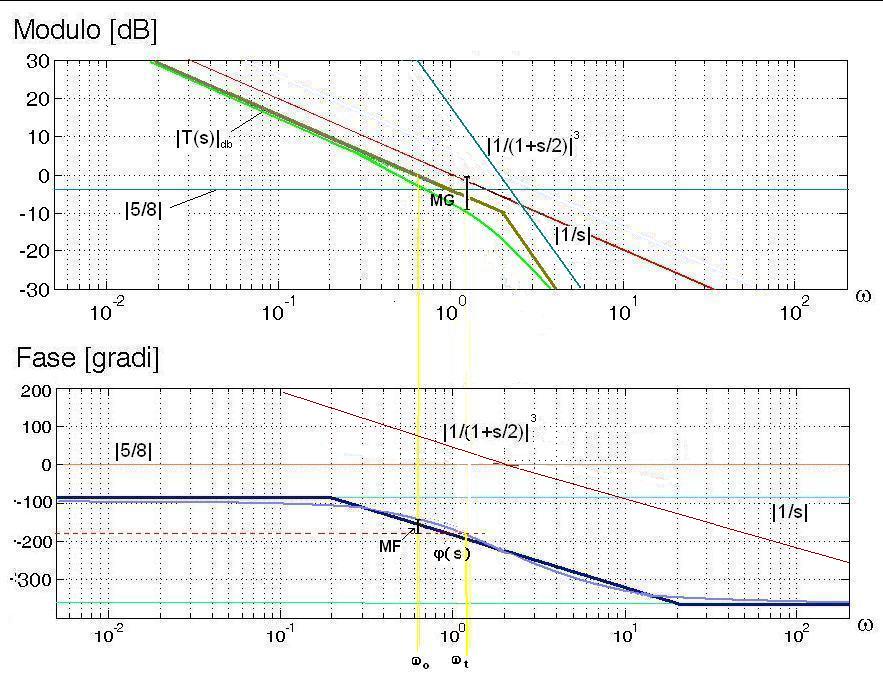
Da questi si ricava la retta di pendenza -20db/dec che interseca l'asse unitario in |T(j)|db = 20∑log|T(j)| = 20∑log(5/8) = -4.1db; quindi la retta di pendenza -60db/dec passante per il punto di rottura w=2rad/sec.
Tracciamento dei diagrammi:
Il modulo di T(s) Ë:
(4.2);
La pulsazione wo corrispondente all'intersezione della funzione con l'asse delle ascisse, si ricava dalla (4.1):
|T(jwo)| = 1 ==> |T(jwo)|db = 0 ==> wo @ 0.56 rad/s
La fase della (4.1) si ricava dalla somma dei seguenti contributi:
- jc = 0, relativo alla costante c=5/8;
- jo = -90∞, relativo al polo nell'origine 1/s;
- jr = -3∑arctan(.5w), relativo ai tre poli reali e coincidenti 1/(1+.5s).
e vale:
j = jc + jo + jr = - 90 - 3∑arctan(.5w) (4.3)
La fase corrispondente alla pulsazione critica Ë: j(wo) = - 90 - 3∑arctan(0.56/2) = -137 rad/sec; da questa si calcola il margine di fase:
MF = 180 + j(wo) = 180 -137 = 43∞
Dalla (4.3) si ricava ora, la pulsazione wt, corrispondente al punto in cui la fase j = -180∞:
wt = 2 tan(30) @ 1.15 rad/s
Sostituendo wt nella (4.2) si ha: |T(j∑wt)| = 0.35, da cui |T(j∑wt)|db = -9db.
Il margine di guadagno, quindi, Ë:
MG = -|T(j∑wt)|db = 9db
Per il criterio generale di stabilitý di Bode, il sistema Ë stabile finchË K, che rappresenta un fattore di traslazione della funzione sull'asse delle ordinate, rende nullo il margine di guadagno:

 ====>
====>