StarNavigator |
|
IL Progetto StarNavigator:Questo progetto, è il frutto di quasi 3 anni di lavoro e di
molti prototipi costruiti tutti con lo scopo di creare un sistema
automatizzato di puntamento ed autoguida per telescopi amatoriali.
Se avete
letto le altre pagine del sito, sicuramente saprete che circa tre anni fa,
con i colleghi dell’Associazione Provinciale Astrofili Novaresi, (APAN), http://www.apan.it si è fondato una Mailing
List (MotoriVB) con lo scopo di creare un SoftWare ed un HardWare di libera
costruzione e di libero sviluppo, consultate il sito apan per maggiori
delucidazioni. La linea
di pensiero per la parte HardWare, dapprima prevedeva un interfacciamento via
porta parallela che pilotasse direttamente i motori, poi con il tempo ci si è
accorti che questo sistema provocava rallentamenti e perdita di passi nei
motori, pertanto si è passati a studiare un nuovo sistema capace di pilotare
i motori in maniera autonoma, che ricevesse dal computer solo la direzione e
la velocità di spostamento. Si è
scelto di usare la porta seriale come porta di interfacciamento, e da qui è
poi nata l’idea di utilizzare oltre che un sistema di comunicazione
proprietario di motoriVB anche l’ormai arcinoto standard LX200 della Meade. Il
vantaggio di tutto ciò è notevole come potete ben immaginare. Il collega Corrado
Pidò, ha realizzato un prototipo di interfaccia che si allinea a questo
progetto, e sarò lieto di ospitare un link in questa sezione ove Corrado
esporrà il suo progetto. (Al momento non sono a conoscenza di link sul lavoro
di Corrado). Nel
frattempo sono sorte molte altre richieste rivolte nella mailing list o
direttamente a me, pertanto grazie all’aiuto di Riccardo Ricci e di Corrado
Pidò, ho iniziato a conoscere i PIC,
ovvero del MicroProcessori Programmabili all’interno dei quali vi sono tutti i
componenti base di un computer, solo più in piccolo. Questi
processori (PIC d’ora in poi), posseggono una memoria RAM, una EPROM Interna,
Una ALU (Unità Aritmetico Logica), alcuni convertitori Analogico/Digitali e
molti altri componenti ma la cosa più
importante uno spazio ove memorizzare in binario il codice programma. Dopo
alcuni progetti di apprendimento vedi il Tester UTP e l’interfaccia LX200 per
Autoguida, mi sono buttato a capofitto nel realizzare un qualcosa di ben più
impegnativo, cioè un sistema che dovesse avere le seguenti caratteristiche: 1. Costo
di realizzazione all’incirca 50 -100 Euro Programmi e Schemi Disponibili
Gratuitamente sul mio Sito continuamente aggiornati 2. Interfacciabilità con qualsiasi programma planetario via
protocollo LX200 3. Autoguida compatibile ST4 per CCD e WebCam 4. Autoguida LX200 utilizzabile da molti programmi
commerciali e da controller proprietari come lo STAR 2000 5. Schermo LCD ove visualizzare menù, settaggi, messaggi
ecc. 6. Tastiera con la quale muoversi fra i menu ed impostare
tutti i parametri 7. Compatibilita’ con qualsiasi montatura equatoriale e
volendo Altazimutale 8. Che possa pilotare motori passo passo sia Unipolari (6
Fili) che bipolari (4 Fili) fino a 4 Ampere 9. Compatibile con lo standard EQ5 e motori MT1 10. Che fosse leggera e trasporabile 11. Che
contenesse al suo interno centinaia o migliaia di oggetti da puntare
direttamente senza l’ausilio del computer, quindi standalone 12. Che
ogni parametro relativo alla montatura fosse liberamente impostabile, quindi
compatibile 13. Che
vi fosse la gestione del BackSlash (Recupero del movimenti dovuti ai giochi
degli ingranaggi sulla montatura e sui motori) 14. Gestione
del P.E.C. (Errore Periodico) 15. Gestione
parametrizzabile e separata per velocità di puntamento, di AutoGuida,
Siderale (stellare) ed altro. 16. Interfacciabilità
con un GPS (Global Position System) per avere le giuste coordinate locali ed
utilizzabile anche interfacciato al computer per programmi di AutoRoute 17. Puntamento
Pianeti, satelliti ed altri oggetti diretto senza computer, (Ancora da finire
l’implementazione) 18. Alimentazione
separata interfaccia e motori in modo da gestire qualsiasi motore 19. Interfacce
motori modulabili secondo gli usi 20. Focheggiatore
motorizzato con memorizzazione della posizione e delle escursioni (Ancora da
implementare per problemi di spazio programma sul PIC) 21. Compatibilità
personalizzata per singoli software di planetario e di controllo 22. Costruzione
interfaccia in Visual Basic su PC che permetta la gestione, la memorizzazione
di tutti i parametri selezionabili da menu secondo il tipo di montatura
(Questo se ne possedete piu’ d’una o se variate spesso la configurazione) Non Vi Basta ?????? Il
progetto in origine utilizzva 3 PIC 16F84A 16 PIN uno gestiva la porta
seriale e leggeva i codici LX200, uno faceva da gestore di tutti i parametri
ed un terzo si occupava dei motori. Ben
presto mi accorsi che questo sistema mi dava più problemi che vantaggi così
utilizzai un PIC più capiente e con più PIN (Ingressi/Uscite) utilizzabili, presi
un 16F876, ma ben presto anch’esso divenne troppo piccolo per gestire tutte
queste cose come volevo io, e passai all’attuale PIC 16F877 da 8 KByte di
spazio programma e ben 40 PIN. Il
progetto utilizza poi una EPROM 24LC32 da 4 Kbyte un quarzo da 4 Mhz ed un
convertitore di segnale MAX232 che converte le tensioni +/-12 della seriale
con le tensioni +/-5 Volt dei PIC, in questo modo praticamente otteniamo un
ulteriore vantaggio separando fisicamente il cuore del sistema dalla seriale
del computer e quindi risparmiando danni irreparabili al Computer ed allo
StarNavigator Oltre ad
un LCD da 16 caratteri per due linee retroilluminato ho inserito prima una
pulsantiera formata da 6 pulsanti (N, S , E , W, Conf, Menu) poi una vera e
propria tastiera Numerica con i 10 Numeri (0-9), 4 tasti che fungono le
funzioni N,S,E,W, e due tasti # e * opportunamente modificati in serigrafia
che fungono la funzione di Conferma e Menù. In
questo modo è possibile muoversi fra i menù, impostare i parametri, e
inserire le coordinate manualmente. Il
sistema comunque legge la Seriale, decodifica il comando e muove il
telescopio, assunte poi le coordinate le comunica al programma che visualizza
sulla carta stellare il l’oggetto puntato. Attualmente
i tests effettuati sono stati con i seguenti SoftWare ed hanno riposato le
seguenti caratteristiche: -
Perseus Perfettamente Funzionante -
Iris Funzionano
Movimenti e puntamenti Iris però non gestisce in maniera standard la Dec e
non trasmette l' AR Correttamente (ad esempio a volte usa
spazio a volte il + sulle coordinate, inoltre vuole un : al posto del
corretto ' nella dec) - SkyMap Attualmente i
miei test sono effettuati sotto win 2000 e skymap non trasmette e riceve
nulla forse sbaglio da qualche parte. Con l' Autoguida gia' realizzata nel
mio sito versione firmware nuova skymap funziona e non da particolari errori) - CartsDuCiel
Funziona bene, la declinazione adesso non viene letta piu' correttamente
nonostante sia corretta forse sbaglio ma dove ??? Per rendere compatibile da
una parte non va piu' dall'altra. - StarryNight Mi
servirebbe la versione che implementa il controllo del telescopio (PRO) - AstroArt Il
programma di riferimento per me in quanto da usare con il CCD e relativo
plugin. Non ho fatto prove nel collegare
lo star2000 allo StarNavigator, Appena posso .... |
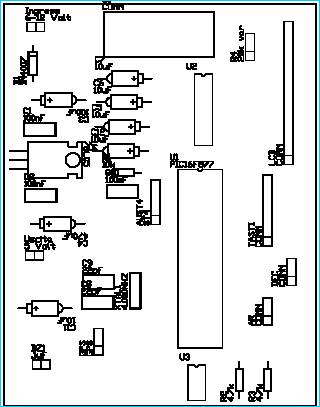
Overlay dei
Componenti
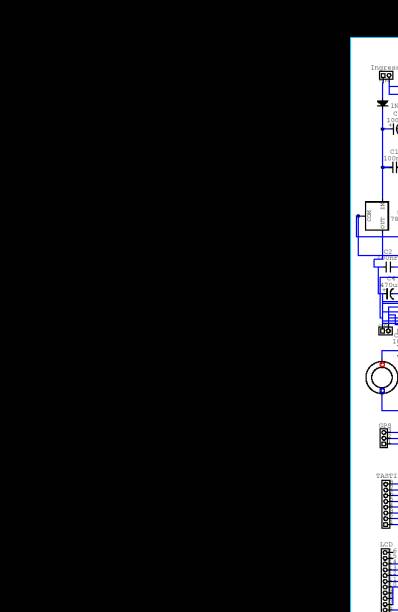
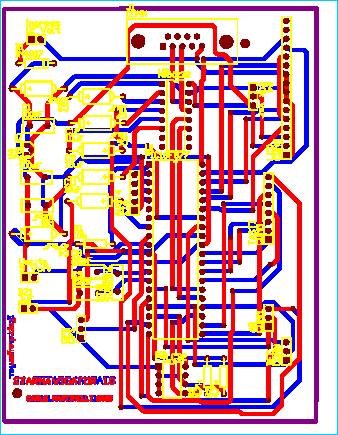
Schema Elettrico
e PCB da Scaricare Ver. 1.0 |