![]()
![]()
![]()
![]()
![]()
RACCOLTA PICCOLI PROGETTI E CIRCUITI UTILI
In questa pagina non troverete progetti interi ma solo alcune parti di circuiti semplici ma in grado di risolvere piccoli problemi che si incontrano spesso durante lo svolgimento del nostro hobby.
Molti di questi circuiti li ho pubblicati in base a richieste ricevute per e-mail e tengo a precisare che sono testati in quanto prelevati da applicazioni che ho già fatto in passato.
Sono disponibile a sviluppo software personalizzato per pic, l'unico inconveniente è la celerità in quanto programmo nei ritagli di tempo per tenermi allenato!
Optoisolatore per porta parallela

Questo circuito è utile ogni volta che abbiamo la necessità di prelevare segnali dalla porta parallela di un pc e non vogliamo correre rischi di guastarla.
E' lo stesso circuito che ho utilizzato io per interfacciare i driver l297 della macchina cnc.
Se il segnale derivante dalla lpt deve essere a logica invertita è sufficiente prelevare l'uscita dal pin 5 del 4n35 ed omettere il transistor e le due resistenze ad esso collegate come da schema sotto riportato.
Questo circuito è adatto al pilotaggio dei segnali del pilota passo passo sotto descritto.

In base al guadagno dell'optoisolatore potrebbe essere necessario diminuire il valore della resistenza da 330 ohm fino a scendere a 180 ohm, valori più bassi possono compromettere la vita della parallela.
Circuito pilota passo passo 1,8 A
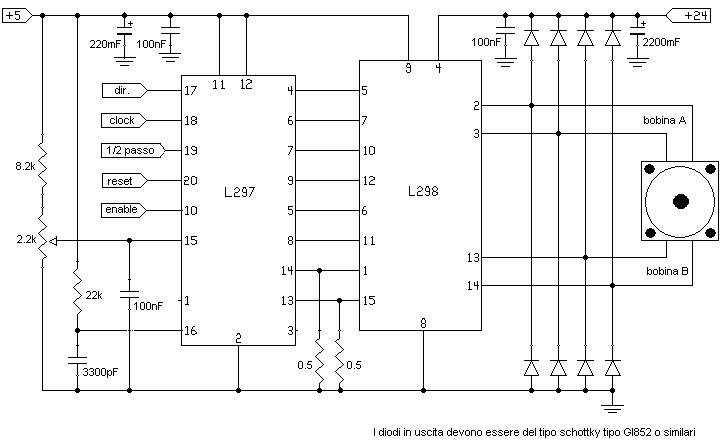
Niente di nuovo o di inventato!!!
Lo schema proposto è quello che si trova sui datasheet del L297 e L298 modificato con l'aggiunta di condensatori di by-pass fondamentali per il funzionamento del circuito e qualche consiglio costruttivo basato su brutte esperienze ma a lieto fine!
L'integrato L297 provvede a creare la sequenza di eccitazione delle bobine del motore ed a regolare la corrente che circola negli avvolgimenti tramite la tecnica pwm pilotando il driver di potenza L298..
In pratica legge il valore di tensione ai capi delle resistenze da 0.5 (valore proporzionale alla corrente V=RxI) ed in base a questa modula il duty-cycle dell'onda quadra che pilota l' L298, il limite di corrente desiderato è regolabile da qualche mA a 2A tramite il trimmer da 2.2k.
In questo modo è possibile impostare la corrente massima quando la frequenze di clock è bassa oppure il motore è fermo.
In ingresso all' L297 troviamo 5 pin che hanno le seguenti funzioni:
DIR. = sceglie la direzione di rotazione in base al livello trovato in ingresso
CLOCK = ingresso di clock, ogni fronte genera un passo del motore
1/2 PASSO = sceglie il pilotaggio a passo intero (livello basso) o mezzo passo (livello alto)
RESET = riporta la sequenza dei passi al punto di inizio (resetta a livello basso)
ENABLE = abilita la circolazione della corrente sulle bobine (attivo a livello alto)
Per livello basso intendo 0V e per quello alto 5V riferiti a Gnd.
L'alimentazione 5V dovrà essere ben stabilizzata (è sufficiente un 7805) mentre per quella a 24V possiamo utilizzare un trasformatore a 18V di adeguata potenza abbinato ad un ponte raddrizzatore, l'integrato è in grado di lavorare correttamente e senza conseguenza alcuna fino a 42V.
Molto importante nel costruire questo circuito sono le piste di massa (devono essere generose e corte) e il posizionamento dei condensatori di By-pass da 100nF (vicini ai due integrati) in quanto essendo un regolatore Pwm genera molti impulsi spuri che ne pregiudicano il buon funzionamento, specialmente se nello stesso stampato convive più di un driver.
Nella macchina cnc avevo costruito uno stampato per i tre assi e fino a quando dovevo muovere 2 motori non c'erano problemi ma al momento che li abilitavo tutti, si influenzavano le regolazioni in corrente portando perdite di passi casuali, in secondo tempo ho deciso di costruire 3 stampati distinti ed i problemi sono finiti!
Consiglio di disegnare lo stampato con una pista di massa che gira lungo il bordo e con una larghezza di almeno 8mm.
Se si pensa di prelevare dall' integrato L298 correnti maggiori di 700 mA consiglio di dotarlo di un'aletta di raffreddamento abbastanza generosa, comunque nella mia macchina cnc piloto i motori con circa 600mA più che sufficienti a sviluppare una forza adeguata allo scopo.
Per interfacciare la scheda alla parallela del pc è sufficiente utilizzare l'interfaccia optoisolatore sopra descritta costruendone una per ogni segnale che ci interessa, secondo il mio parere ne bastano 2, una per il clock ed una per scegliere la direzione mentre si può tenere a livello logico alto il pin di 1/2 passo, di enable e quello di reset.
Volendo si può interfacciare il circuito direttamente alla lpt ma lo sconsiglio vivamente per evitare guasti irreparabili alla porta o addirittura al pc.
Stadio di potenza per pilotaggio motore in cc
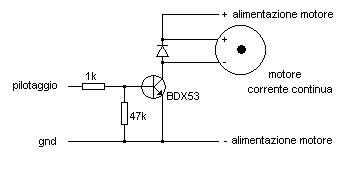
Questo circuito può essere usato come stadio di potenza per accendere e spegnere un motore in cc e per poter regolare la sua velocità con un generatore di impulsi pwm.
In base alla corrente ed alla tensione di lavoro del motore si deve scegliere un transistor con caratteristiche adeguate, il BDX53 è adatto a piccoli trapani tipo quello che utilizzo nel progetto del foratore. Nel mio progetto l'onda quadra viene generata dal Pic utilizzando il generatore Pwm interno.Il diodo in parallelo al motore è utile a limitare le extratensioni che si generano e che danneggerebbero il transistor, per piccoli motori è sufficiente un 1N4007 meglio utilizzare un diodo schottky di potenza adeguata.
La regolazione della velocità avviene variando il rapporto tra la durata del livello ad uno e la durata del del livello a 0 del generatore di impulsi, la frequenza utilizzata in genere è da 20.000 a 30.000 Hz in modo che il motore non generi suoni udibili dall'orecchio umano.

Lo stesso circuito può essere utilizzato per variare la luminosità di lampade a bassa tensione.
Avanti indietro per motore in cc da 4A

Utilizzando un L298 è possibile realizzare un invertitore di marcia per motori in CC predisposto per ricevere impulsi di pilotaggio pwm per variarne anche la velocità.Questo integrato in realtà ha all'interno due stadi, in questa applicazione lavorano in parallelo per aumentare la corrente di uscita
I pin corrispondenti dei due stadi sono :
stadio A stadio B
10 5 ruota a dx
12 7 ruota sx
11 6 abilitazione
13 2 out +
14 3 out -
15 1 comune negativo
E' lo stesso circuito che utilizzo per pilotare il motore che alza ed abbassa il trapano del mio foratore.
I pin 11-6 dell'integrato possono essere usati come abilitazione alla rotazione oppure applicandovi un segnale modulato in Pwm per regolare la velocità del motore.
Con i pin 10-5 e 12-7 si sceglie il senso di rotazione, inoltre portandoli allo stesso livello possiamo bloccare il motore in frenatura rapida. Questa è la tabella che spiega le funzioni di questi pin:
10-5 12-7
H L ruota a dx
L H ruota sx
L L fermata rapida
H H fermata rapida
Sui pin 15-1 possiamo leggere una tensione, riferita a massa, proporzionale alla corrente assorbita dal motore, qualunque sia il suo senso di rotazione, se non ci interessa questa funzione, le resistenze possono essere tolte e ponticellate dal momento che sono componenti un pò ingombranti e che generano calore.
La tensione letta sulle resistenze assume il valore di 1 volt con la circolazione di 4A infatti V=R*I quindi 0,25x4=1V.
La corrente massima erogabile è di 4A ma non dobbiamo dimenticare di dissipare bene il calore che genera l' L298, se invece siamo interessati a prelevare solo 2A possiamo collegare solo i pin riguardanti uno stadio.
I diodi di protezione da extracorrenti devono essere del tipo schottky da 5A almeno.
L' alimentazione massima applicabile al motore è 42V mentre per la logica dobbiamo fornire 5V stabilizzati.
Regolazione in corrente per carica batterie Ni-Cd e Ni-Mh
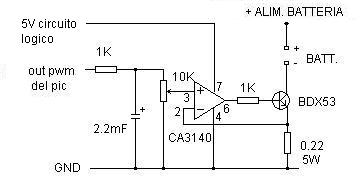
Questo circuito è un regolatore di corrente di carica ber batterie al Ni-Cd e Ni-Mh.
Prelevando l'uscita pwm di un pic e integrandola tramite il condensatore da 2.2mF in pratica realiziamo un riferimento di tensione regolabile per l'amplificatore operazionale, questo leggendo la tensione ai capi della resistenza da .22ohm pilota il transistor per fare in modo che la caduta si equivalga al riferimento.
Si deduce che variando tale riferimento si varia la corrente che scorre sulla resistenza e di conseguenza sulla batteria.
Con il trimmer da 10k siamo in grado di regolare la corrente massima.
A questo punto programmando un pic in modo adeguato possiamo costruire un caricabatterie universale che permette di stabilire la corrente di carica ed il tempo, magari impostando i valori voluti in un display lcd tramite un tastierino.
La tensione di alimentazione delle batterie deve essere almeno 2-3 volts maggiore di quella degli elementi da ricaricare.
Se siete interessati a regolare manualmente la corrente di carica, è sufficiente portare i 5V in ingresso alla resistenza da 1K e variare il set-point tramite il trimmer.
ATTENZIONE a non portare il trimmer al massimo perchè questo porterebbe in conduzione il transistor facendo circolare correnti altissime (teoricamente più di 20A).
Interfaccia comunicazione plc Siemens S5
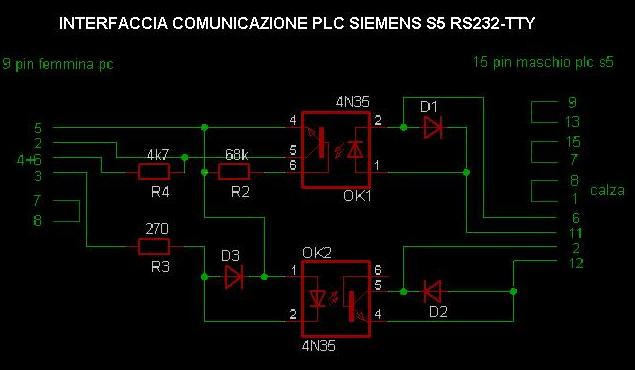
Questa semplice interfaccia permette di trasformare la porta RS232 del pc in loop current TTY per comunicare con i plc della Siemens vecchia serie Step5. I diodi impiegati sono 1N4148 oppure qualsiasi diodo al silicio.
L'autore non è responsabile per eventuali danni recati a persone o cose
derivanti dall'uso di questi progetti.
 Questa pagina è in costruzione, con il passare dei giorni gli schemi
aumenteranno!!
Questa pagina è in costruzione, con il passare dei giorni gli schemi
aumenteranno!!
![]()