|
di
|
|
|
di
|
|
|
di
|
|
CHI SONO
L' intento di
questo sito � di esplorare una delle tematiche pi� scottanti della ricerca
scientifica che, sebbene per molti rester� solo materiale per fantascienza, �
una realt�, portatrice di innovazioni pratiche, ma anche di inquietanti
prospettive. E' la proposta di un viaggio in quella che � stata sicuramente la
ricerca pi� affascinante e �interdisciplinare� degli ultimi cinquant�anni per
scoprire che probabilmente la prima forma di vita intelligente che l�uomo
incontrer� non viene da marte, ma abita nel suo cellulare �
Il sito � una raccolta di approfondimenti personali che ho piacere di
condividere col �popolo� della rete allo scopo di poter essere un�utile risorsa
oltre che, naturalmente, svago. Tutto ci� che contiene quindi � stato scritto
con proprie tesi di laurea e testi sotto mano, cercando di evitare ipotesi
azzardate, fraintendimenti e/o teorie personali che stanno facendo scadere
l�attendibilit� della maggior parte delle informazioni reperite su internet. Ma
nonostante tutto sto ancora imparando e potrei commettere qualche errore, oltre
alla coscienza di un lavoro sicuramente poco organico e incompleto. In alcuni
casi non mi sono per� privata totalmente del privilegio di esprimere alcune mie
opinioni che, per quanto poco azzardate e in ogni caso frutto di anni di studi,
ho voluto contraddistinguere esplicitamente dal resto.
DISCLAIMER
Si sottolinea che non s�intende contravvenire a nessuna violazione su diritti
d�autore e simili. Tutto il materiale presente nel sito � di propriet�
dell�autore. Per ogni teoria trattata o citazione � sempre indicato il nome del
proprietario dei diritti intellettuali. Nel caso di sviste od ommissioni in
citazioni o simili si contatti il webmaster cha sar� pronto a correggere
immediatamente l�errore.
INTELLIGENZA ARTIFICIALE


Con il termine intelligenza artificiale (spesso abbreviato
in AI, dall'inglese Artificial Intelligence), si intende generalmente l'abilit�
di un software di svolgere funzioni e ragionamenti tipici della mente umana.
L'AI (intelligenza artificiale) � quella disciplina che cerca di creare macchine
che in qualche senso possiamo definire intelligenti. L�intelligenza artificiale
� lo studio delle idee che permettono agli elaboratori elettronici di seguire
quelle azioni che fanno apparire "intelligenti le persone". Sembra pi� chiaro,
ma il senso a cui prima mi riferivo � ancora piuttosto vago. Possiamo definire
una macchina capace di svolgere azioni del genere intelligente? Se una persona
svolge un calcolo matematico ovviamente si dice che � un'essere intelligente,
mentre sareste disposti ad assentire se definissi intelligente la vostra
calcolatrice tascabile?
E soprattutto cos'� che fa apparire intelligenti le persone? Quindi cos'�
l'intelligenza? Definirla non � cos� semplice. Per un troppo lungo periodo
l'intelligenza si � considerata come un parametro oggettivo misurabile (vedi le
misurazioni del quoziente intellettivo), ma oggi pi� che mai ci si rende conto
che l'intelligenza umana � estremamente oscura nei suoi meccanismi ed inserita
in quel sistema estremamente complesso che � il nostro organismo con cui
intrattiene strettissimi rapporti, oltre ad essere funzione anche di quel
sistema incommensurabilmente pi� vasto che � il mondo di cui fa esperienza.
Howard Gardner prosegue la sua corsa all'isolamento di nuovi tipi di
intelligenza: non abbiamo solo un tipo di intelligenza, quella
logico-linguistica che in genere � quella che viene valutata nelle scuole ma
anche quella musicale o cinestetica (che si riferisce alla grazia e bellezza nei
movimenti). Molti altri studiosi invece la fanno dipendere anche e soprattutto,
contrariamente a quanto si � sempre fatto, dal complesso delle emozioni, da
quello che appunto veniva definito irrazionale.
Che cos'� l'Intelligenza Artificiale
L'obiettivo dell'AI si conentra in poche parole: realizzare sui calcolatori
elettronici programmi che siano intelligenti. In realt�, la scelta dei
calcolatori elettronici non � determinata da una necessit� teorica ma dall'
esigenza di costruire intelligenze che funzionino in modo automatico, senza
l'intervento esterno dell'uomo ed attualmente gli elaboratori elettronici sono
le macchine pi� potenti ed efficienti che si hanno a disposizione per tale
scopo. E' importante soffermarsi sulla qualifica di intelligente applicata a un
programma. In questo caso le cose si complicano perch� neppure gli psicologi
sanno con precisione che cosa sia l'intelligenza (anche se spesso la misurano).
Per i ricercatori dell'AI, intelligente � un programma che fornisce una
prestazione che diremmo intelligente qualora fosse esibita da un essere umano.
Attenzione e memoria sono sempre necessarie e senza di esse il pensiero non
potrebbe esistere; ma l'intelligenza � qualcosa di pi�: � la capacit� di porre e
di risolvere problemi almeno parzialmente nuovi, di cui non si conosca a priori
un procedimento risolutivo. Innanzitutto, � chiaro che l'intelligenza non �
posseduta solo dagli esperti e dai geni, ma � patrimonio, in grado diverso, di
tutti gli esseri umani. Inoltre, l'AI ha messo in luce che tante attivit�
comunissime richiedono una dose di intelligenza a volte insospettata: ad esempio
parlare e comprendere un linguaggio, vedere e riconoscere un oggetto, muoversi
adeguatamente in un ambiente. Quando si parla di prestazioni intelligenti
dobbiamo approfondire il concetto distinguendo i risultati di un'attivit�
intelligente dai procedimenti mentali seguiti. Molti ricercatori ritengono che
la pietra di paragone di un'intelligenza artificiale siano soltanto i risultati.
In questo senso, sarebbe irrilevante simulare il modo di pensare dell'uomo o
procedere in modo radicalmente diverso; dopotutto, il calcolatore elettronico ha
una struttura ben differente dal cervello umano. Ad una posizione cos�
comportamentistica si possono muovere diverse obiezioni. Innanzitutto, l'AI non
dovrebbe essere soltanto una tecnologia avanzata, ma anche una disciplina
conoscitiva e quindi la comprensione dei procedimenti mentali umani � importante
almeno quanto le applicazioni immediate. Ma anche chi fosse interessato solo al
versante applicativo non deve dimenticare che la nostra mente, in centinaia di
migliaia di anni di evoluzione naturale, ha raggiunto un ragguardevole stadio di
perfezionamento; e quindi pu� essere assai produttivo studiarne la struttura
interna per riprodurla sul calcolatore. Contemporaneamente, si potrebbe
obiettare che la comprensione dell'intelligenza umana � un obiettivo troppo
ristretto per l'AI, il cui vero oggetto d'indagine dovrebbe essere
l'intelligenza generale ovvero, qualunque procedimento di elaborazione
intelligente dell'informazione, indipendentemente dalla forma che tale
elaborazione ha assunto nella mente dell'uomo.
La distinzione fra intelligenza artificiale forte e debole risulta il fronte di
battaglia concettuale in seno alla concezione classica. Riguarda il modo di
concepire l'IA, e per questo secondo me pu� essere proficuo applicarlo anche al
campo connessionista ovviamente con le dovute modificazioni del caso.
L�A.I. FORTE presuppone che ogni operazione della nostra mente sia riducibile a
un calcolo. Il nostro pensiero quindi non � altro che una manipolazione di
simboli secondo regole, cosa che il computer sa fare benissimo. Quindi un
elaboratore pu� raggiungere un livello di intelligenza considerata ad un livello
qualitativo pari a quella umana, dello stesso tipo. Alla base di questa tesi sta
la credenza che il cervello sia al pari di un computer un sistema formale, o
meglio che il ragionamento non sia altro che un calcolo inteso come
manipolazione di simboli. Questa idea sar� descritta nella sezione
sull'Intelligenza Artificiale classica
Per L� A.I. DEBOLE un calcolatore non potr� mai ottenere un�intelligenza degna
di tale nome ma al massimo potr� simularci imperfettamente. Per l'IA debole un
calcolatore potrebbe anche svolgere alcune o tutte quelle
operazioni e compiti che sono prerogativa dell'essere umano (riconoscere
volti, dialogare in linguaggio naturale, prendere decisioni, ecc.) e
potrebbe farlo anche benissimo, ma questo non significa che sia veramente
intelligente o che ci sia qualche analogia tra computer e mente. .
L'esomorfismo fra "information bases" ed elementi compatti dei domini di Scott
ricade nel quadro generale delle dualit� di Stone.
Le dualit� di Stone permettono di descrivere speciali classi di spazi topologici
per mezzo di ordini parziali (possibilmente finitari).
Questi ordini parziali sono definiti per mezzo di una topologia e di una sua
base o sottobase. La propriet� principale � la dualit� tra le categorie degli
spazi di Stone e quella delle algebre booleane.
Altri esempi di dualit� sono le descrizioni dei domini di Scott tramite gli
information sytem e la descrizione dei domini SFP come pre-locali. E non bisogna
dimenticare l'interpetazione data da Martin-Lof della teoria dei tipi
intuizionista nella teoria dei domini.
Abrasky ha spiegato le dualit� di Stone usando la teoria dei "frames" e
inquadrandole nella pi� ampia prospettiva della "teoria dei domini in forma
logica".
I tipi intersezione possono essere visti come una restrizione della descrizione
dei domini in forma logica al caso particolare di reticoli completi
omega-algebrici
tipi in interazione sono usati come potente strumento sia per l'analisi sia per
la sintesi di modelli a filtro per i lambda calcoli non tipati.)
In questo approccio, un modello � descritto in modo finitario da un sistema per
assegnare tipi a termini, e differenti modelli possono essere ottenuti
scegliendo particolari ordini parziali sull'insieme dei tipi, che si riflettono
in una corrispondente regola di inferenza di tipo (sussunzione).
Il sistema di assegnazione dei tipi ai termini corrispondenti a un modello
fornisce una definizione induttiva finitaria dell'interpretazione dei termini
stessi nel modello, in quanto l'interpretazione di un termine � l'insieme dei
tipi che si possono dedurre per esso.
Questo pu� essere espresso dallo slogan: "il significato di un programma �
l'insieme di tutte le proposizioni vere che lo riguardano".
I tipi possono suggerire la forma che il modello deve possedere per evidenziare
particolari propriet� dei termini.
I tipi intersezione sono un flessibile strumento per dimostrare la consistenza
di lamb, teorie, la facilita� di termini del lambda calcolo e l'esistenza di
termini che rappresentano operatori di dominio.
Con I.A. lo scopo di questa disciplina sarebbe stato quello di "far fare alle
macchine delle cose che richiederebbero l'intelligenza se fossero fatte dagli
uomini".
L'IA, come viene studiata oggigiorno, tratta dell'individuazione dei modelli
(appropriata descrizione del problema da risolvere) e degli algoritmi (procedura
effettiva per risolvere il modello).
Questa formulazione viene studiata con differenti sapori e con approcci
differenti. Ognuno dei due aspetti (modellizzazione o algoritmico) ha via via
maggiore o minore importanza e varia lungo uno spettro abbastanza ampio.
Le attivit� e le capacit� dell'Intelligenza Artificiale comprendono:
a) il machine learning
b) la e il in maniera simile a quanto fatto dalla mente umana
c) la pianificazione (planning)
d) la cooperazione tra, sia che ()
e) il' Natural Language Processing
d) la simulazione della visione e dell'interpretazione di immagini.
RETI NEURALI
RETI NEURALI
La struttura cellulare del cervello e la sua fisiologia .
Studiare la struttura biologica e la fisiologia del cervello � un compito tutt'altro
che facile. Tuttavia a partire dall'inizio del nostro secolo sono stati fatti
dei grandissimi passi in avanti in questo campo. Oggi disponiamo di
apparecchiature, come la TAC, che ci consentono di ottenere immagini dettagliate
del cervello in attivit�. E molte conoscenze sono venute anche studiando i danni
e le disfunzioni riportate da persone cerebrolese.
In questo modo i neuroscienziati sono riusciti a capire che tutte le attivit�
intelligenti sono controllate dalla parte esterna del cervello, quella parte
caratterizzata da un superficie involuta di colore grigiastro e chiamata
corteccia cerebrale. E sappiamo anche che la corteccia � a sua volta divisa in
diverse regioni specializzate: ogni regione controlla una determinata facolt�
cognitiva. Ma le conoscenze sul cervello non si fermano qui. I neuroscienziati,
infatti, sono riusciti a ricostruire anche la struttura cellulare del cervello e
a capirne almeno in parte il funzionamento.
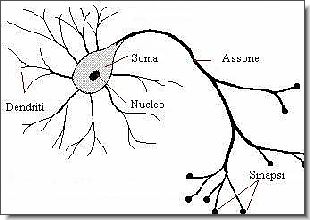
Il cervello � costituito da un enorme insieme di cellule, denominate neuroni. I
neuroni sono costituiti da un corpo centrale o soma, dal quale si dipartono una
serie di prolungamenti filiformi; alcuni di questi prolungamenti sono piuttosto
'corti' e terminano a loro volta in strutture fortemente ramificate: essi sono
denominati dendriti. Uno dei prolungamenti invece � molto pi� lungo degli altri
(talvolta, come avviene nelle cellule collegate direttamente agli organi
sensoriali esso pu� estendersi persino per diverse decine di centimetri) e si
chiama assone. Anche l'assone termina in una o pi� 'code' alla cui estremit� si
trova una sorta di rigonfiamento, detto sinapsi. Ogni neurone � collegato
mediante le sue terminazioni sinaptiche ai dendriti di molti altri neuroni. In
questo modo i neuroni, che nel cervello umano sono circa dodici miliardi,
formano un reticolo di interconnessioni fittissimo: secondo alcune stime il
numero di connessioni possibili (che ovviamente non sono pari a quelle realmente
esistenti) sarebbe superiore al numero degli atomi nell'universo!
Ma come funzionano queste cellule ed in che modo determinano l'attivit� del
cervello? Ebbene, si � scoperto che i neuroni comunicano tra loro scambiandosi
dei segnali elettrici e attivandosi reciprocamente. Il rilascio di un segnale da
parte di un neurone non � automatico e immediato: affinch� avvenga � necessario
che il neurone venga eccitato da altri neuroni fino al superamento di una certa
soglia; solo allora la cellula invia un segnale agli altri neuroni con cui �
collegata. I segnali in uscita da un neurone viaggiano sotto forma di minuscoli
impulsi elettrici cha vanno dal nucleo della cellula, lungo l'assone, fino alle
sinapsi. Quando le cariche giungono alle terminazioni sinaptiche esse inducono
la liberazione di particolari molecole dette neurotrasmettitori; queste a loro
volta raggiungono le terminazioni dendritiche dei neuroni collegati all'assone,
e scatenano una reazione chimica che permette il passaggio del segnale elettrico
da un neurone all'altro.
Studiando l'attivit� biochimica dei neuroni mediante dei raffinati sistemi di
rilevamento, si � notato che ogni diversa facolt� cognitiva e locomotoria
corrisponde ad una aumento di attivit� in particolari aree del cervello. Si
suppone perci� che il cervello abbia una struttura modulare: ogni modulo �
specializzato per un certo tipo di attivit�.
Le ricerche di impostazione connessionista hanno cercato di emulare il
comportamento delle cellule neuronali facendo ricorso alle cosiddette reti
neurali:
Una rete neurale � una struttura formata da un certo numero di unit� collegate
tra loro da connessioni. Attraverso le connessioni un'unit� influenza
fisicamente le altre unit� con cui � collegata. Le unit� neurali hanno alcune
caratteristiche essenziali delle similicellule nervose, mentre le connessioni
alcune delle caratteristiche essenziali dei collegamenti sinaptici tra neuroni.
Una rete neurale � costituita da un insieme di nodi collegati. Per ogni nodo vi
sono dei collegamenti di input (da cui arrivano segnali) e dei collegamenti di
output (attraverso cui la rete emettte segnali). I nodi possono assumere due
stati: stato di riposo e stato di attivazione. Quando un nodo � in stato di
attivazione esso invia dei segnali ai nodi con cui � collegato. Un aspetto
importante della microfisiologia cerebrale che viene emulato dalle reti neurali
� il sistema di eccitazione. Infatti i collegamenti tra i nodi di una rete
neurale sono di due tipi: collegamenti eccitatori e collegamenti inibitori. Ogni
collegamento tra un nodo della rete e un altro, inoltre, � dotato di un peso. Il
peso del collegamento che assegna diversi valori ai segnali che li attraversano.
Ogni nodo diventa attivo e dunque manda un segnale ai nodi ad esso connessi solo
se i messaggi che gli arrivano (nel computo tra segnali inibitori e segnali
eccitatori) lo portano oltre una certa soglia di attivazione (misurata mediante
una scala numerica). Visto nel suo complesso, il comportamento di una rete
neurale pu� essere descritto come un processo in cui, una volta fornita in
ingresso alla rete una configurazione di segnali-stimolo (mediante l'attivazione
di alcuni suoi nodi, detti nodi in input), la rete rilascia in uscita un'altra
configurazione di segnali.
Le reti neurali si differenziano in base alla loro architettura, cio� in base al
modo in cui i nodi si dispongono su uno o pi� strati: in particolare si
distinguono reti a uno strato, reti a due strati reti a tre o pi� strati. In
questi ultimi due tipi gli strati esterni svolgono rispettivamente la funzione
di strato di input e strato di output, un po' come nel cervello ci sono cellule
che sono in contatto diretto con gli organi di senso e cellule che governano il
movimento e l'emissione di messaggi vocali.
Un altro aspetto che differenzia le reti neurali � rappresentato dalla tipologia
delle connessioni tra i nodi: in alcuni casi le connessioni viaggiano solo in un
senso; in altri, i messaggi possono andare sia in avanti sia indietro; in altri
ancora, nodi topologicamente distanti possono avere dei collegamenti diretti.
Dal punto di vista della implementazione, una rete neurale pu� essere simulata
interamente 'via software' mediante un normale calcolatore digitale; oppure pu�
essere realizzata direttamente a livello hardware, mediante la connessione di
molti semplici microprocessori in grado di lavorare in parallelo.
Quali propriet� hanno le reti neurali che le rendono, oltre che un modello (a
dire il vero ancora 'alla lontana') del cervello, un possibile modello dei
comportamenti intelligenti?
Una prima propriet� interessante � che le reti neurali, a differenza dei
computer digitali, funzionano in modalit� parallela, nel senso che in ogni
istante molti nodi cambiano il loro stato simultaneamente. Questo tipo di
elaborazione sembra essere molto pi� aderente al funzionamento reale del
cervello rispetto al modello di elaborazione sequenziale proprio delle macchine
di Turing e Von Neumann. Ma la propriet� pi� interessante delle reti neurali �
la loro capacit� di apprendimento: esse cio� possono imparare a svolgere dei
compiti senza bisogno di essere programmate esplicitamente.
Il processo di apprendimento avviene in questo modo: per un dato periodo di
tempo vengono forniti alla rete una serie di stimoli in entrata e i
corrispondenti stimoli in uscita che essa dovrebbe generare. Ad esempio, in
entrata vengono fornite le rappresentazioni in formato bitmap dei caratteri di
un certo sistema di scrittura, e in uscita le corrispondenti posizioni della
tavola ASCII . Durante questo periodo nella rete vengono modificati i pesi
assegnati ai collegamenti tra nodi. Superata un certa soglia di
autorganizzazione interna la rete � in grado di riconoscere da sola le
configurazioni di input: essa ha cio� imparato a riconoscere i caratteri della
scrittura.
Un'altro aspetto estremamente interessante delle reti neurali (soprattutto in
relazione al discorso sui fondamenti dell'intelligenza artificiale classica e
sulla teoria rappresentazionale della mente) � che in esse la conoscenza
necessaria a svolgere un dato compito non � rappresentata da simboli distinti
che vengono trasformati in base a regole, ma � diffusa tra tutti i nodi della
rete che concorrono ad elaborala. In altri termini, la conoscenza insita in una
rete neurale e la sua elaborazione sono subsimboliche.
Anche da questa nostra breve trattazione, appaiono evidenti le ragioni in virt�
delle quali si afferma che il connessionismo rappresenti un paradigma teorico
radicalmente diverso dalla teoria computazionale classica: esso in primo luogo
sostiene che per ottenere un comportamento intelligente � necessario emulare la
struttura fisica (cellulare per la precisione) del cervello; ma soprattutto
sostiene che i processi cognitivi e, inter alia, il pensiero, non sono il
prodotto di processi computazionali simbolici, ma emergono dal comportamento
complessivo di moltissime unit� subsimboliche che, prese singolarmente, non
rappresentano niente.
Sulla base di questo paradigma, la cui prima formulazione risale ad un
lungimirante saggio di W. McCulloch e W. Pitt risalente al 1943 (W. McCulloch e
W. Pitt, "A Logical Calculus of the Ideas Immanent in Nervous Activity", in Bul.
Math Biophys, sono state realizzate numerose applicazioni delle reti neurali in
vari domini: per esempio nella simulazione dei comportamenti elementari di
specie inferiori, spesso associata alla costruzione di robot reali. In questo
settore specifico il primo esperimento importante � stato il Perceptron di
Rosenblatt (1958) che era un robot in grado di muoversi in un ambiente evitando
gli ostacoli. Un altro settore in cui il paradigma connessionista ha avuto larga
diffusione � quello dello studio e della emulazione dei processi soggiacenti
alla percezione, ambito nel quale l'impostazione computazionale classica ha
mostrato notevoli limiti. E non sono mancate anche le applicazioni pratiche,
soprattutto nel campo dei software per il riconoscimento dei caratteri (OCR, su
cui ci siamo soffermati nel primo capitolo), e, negli ultimi anni, anche nel
campo dell'analisi finanziaria.
Intorno a queste sperimentazioni, poi, � proliferata una ingente mole di
letteratura teorica e filosofica che considera il connessionismo la strada
maestra per la creazione di macchine intelligenti e per lo studio
dell'intelligenza naturale. Naturalmente i sostenitori dell'IA classica e della
teoria rappresentazionale hanno reagito, producendo una pari mole di
confutazioni delle tesi connessioniste. E in realt�, sebbene il connessionismo
abbia riportato dei buoni successi nei domini che abbiamo appena ricordato,
quando si � tentato di applicarlo alla riproduzione artificiale delle facolt�
cognitive superiori ha rivelato non pochi limiti. Infatti, � innegabile che
molte di queste attivit� consistano in qualche specie di elaborazione simbolica
(non necessariamente di tipo computazionale): e finora nessuno � stato in grado
di capire come dalla concorrenza di moltissimi processi di elaborazione
paralleli e subsimbolici possa effettivamente emergere una qualche forma di
elaborazione simbolica, come la competenza linguistica o la capacit� di
ragionare in modo deduttivo.
Per questa ragione molti studiosi sono convinti che se una prospettiva di
sviluppo e di successo per l'intelligenza artificiale esiste veramente, questa
scaturir� dalla convergenza tra il modello computazionale e modello
connessionista. Infatti i processi che avvengo nel cervello, almeno allo stato
attuale delle conoscenze, sembrano disporsi su vari livelli: ai livelli bassi
(che corrispondo alla percezione e ai processi di elaborazione degli stimoli
provenienti dall'ambiente) avvengono molte elaborazioni veloci e parallele di
elementi subsimbolici; ai livelli alti invece si collocano dei processi che
trasformano l'output dei livelli bassi in simboli e con tali simboli eseguono
quelle elaborazioni che la Buona Vecchia IA ha studiato da mezzo secolo ai
giorni nostri.
L'intelligenza artificiale classica utilizza il paradigma simbolico per
affrontare problemi considerati di alto livello.
L'approccio classico non riesce per� ad affrontare problemi apparentemente
semplici, quali il meccanismo di volo di una mosca.
Le funzioni biologiche e cognitive che sembravano pi� elementari si sono
dimostrate essere pi� difficili di quanto si pensasse, pi� complesse di funzioni
considerate di alto livello; soprattutto, tali funzioni sono estremamente
difficili da simulare con l'approccio computazionale classico.
Simulare il S.N.C.
Poich� i sistemi nervosi biologici sono in numerose circostanze pi� potenti dei
sistemi computazionali classici, si � cercato di simularne le potenzialit�
riproducendo alcuni aspetti della loro architettura fisica.
L'architettura biologica
L'approccio connessionista � sorto dall'ipotesi che la capacit� dimostrata dai
sistemi biologici ad affrontare compiti complessi fosse dovuta all'architettura
fisica del loro sistema nervoso. Si � dunque tentato di creare delle
architetture fisiche che riproducessero, in maniera semplificata, alcune delle
caratteristiche del S.N.C.
Un differente paradigma computazionale.
Le macchine di von Neumann sono basate su un'astrazione di elaborazone e memoria
del ragionamento umano;
Le reti neurali sono basate sull'architettura parallela del cervello biologico
Gli aspetti considerati salienti sono:
numerosit� - parallelismo: le reti neurali biologiche sono composte da un numero
elevatissimo di unit� che lavorano in parallelo
connettivit�: le unit� sono fra loro altamente connesse
Altre caratteristiche salienti
unit� computazionali semplici;
alto grado di connettivit�;
utilizzo di messaggi (relativamente) semplici;
interazione adattiva fra elementi.
Le potenzialit� delle reti
Le caratteristiche biologiche dei neuroni, la loro numerosit� e la loro
connettivit� permettono l'emergere di alcune caratteristiche molto importanti
Risposta continua ad esclusione di un numero finito di discontinuit� ad input
simili la rete risponde con output simili.
Tolleranza agli errori
scostamenti non significativi dei valori di input vengono assorbiti dalla rete,
diminuendo cos� il rumore statistico e risultando tolleranti agli errori o al
decadimento del segnale.
Tolleranza ai guasti
La presenza di molte unit� di processamento parallele l'eventuale perdita di un
unit� ha, nel caso di architetture con molti neuroni, conseguenze non
irreparabili.
Capacit� di apprendimento
Attraverso degli opportuni algoritmi di modificazione dinamica dei pesi la rete
riesce ad adattare il proprio comportamento fino a computare una funzione
arbitraria y= f (x) in base agli esempi presentati.
Capacit� di generalizzare
Grazie al fatto che la risposta delle reti � continua (ad esclusione di un
numero finito di discontinuit�) il sistema che abbia correttamente appreso una
funzione riesce di norma a fornire una risposta "ragionevole" anche a stimoli
precedentemente mai occorsi.
Livelli di descrizione
Livello biologico - neurofisiologico
Livello matematico
Livello fisico
Livello statistico
Intelligenza artificiale
Modelli psicologici e neuropsicologici
Livello biologico - neurofisiologico
Le reti neurali artificiali costituiscono delle metafore delle reti neurali
biologiche;
nell'ambito delle "neuroscienze computazionali" le reti costituiscono dei
modelli teorici di aree funzionali del sistema nervoso centrale.
Livello matematico
Le reti sono oggetti matematici, in quanto vengono realizzate attraverso degli
stumenti matematici classici;
esse sono, a loro volta, degli strumenti matematici, in quanto calcolano delle
funzioni arbitrarie.
Livello fisico
Alcune architetture di reti neurali artificiali presenti in letteratura
costituiscono dei modelli di alcuni domin� fisici. L'esempio pi� significativo �
costituito dalle reti di Hopfield, che simulano il comportamento
elettromagnetico dei metalli.
Livello statistico
i percettroni senza strati nascosti costituiscono dei modelli lineari;
le reti con uno strato nascosto sono paragonabili a dei modelli di regressione;
le reti neurali probabilistiche corrispondono alla kernel discriminant analysis;
le reti di Kohonen di quantizzazione vettoriale adattiva sono simili alla
cluster analisys;
la regola di Hebb � correlata all'analisi delle componenti principali;
Intelligenza artificiale
Le reti neurali possono realizzare degli strumenti, e vengono usate in numerosi
contesti, proprio perch� capaci di affrontare problemi complessi e poco o male
strutturati sotto il profilo formale
Modelli psicologici e neuropsicologici
Se la simulazione vale esclusivamente a livello di corrispondenza input-output
la rete costituisce un modello psicologico; qualora l'architettura della rete
corrisponde a dei moduli funzionali che si assume siano coinvolti in un processo
cognitivo possiamo parlare di simulazione di modelli neuropsicologici.
Gli aspetti considerati salienti sono:
numerosit� - parallelismo: le reti neurali biologiche sono composte da un numero
elevatissimo di unit� che lavorano in parallelo
connettivit�: le unit� sono fra loro altamente connesse
Altre caratteristiche salienti
unit� computazionali semplici;
alto grado di connettivit�;
utilizzo di messaggi (relativamente) semplici;
interazione adattiva fra elementi.
Le potenzialit� delle reti
Le caratteristiche biologiche dei neuroni, la loro numerosit� e la loro
connettivit� permettono l'emergere di alcune caratteristiche molto importanti
Risposta continua
ad esclusione di un numero finito di discontinuit� ad input simili la rete
risponde con output simili
Tolleranza agli errori
scostamenti non significativi dei valori di input vengono assorbiti dalla rete,
diminuendo cos� il rumore statistico e risultando tolleranti agli errori o al
decadimento del segnale.
Tolleranza ai guasti
La presenza di molte unit� di processamento parallele l'eventuale perdita di un
unit� ha, nel caso di architetture con molti neuroni, conseguenze non
irreparabili.
Capacit� di apprendimento
Attraverso degli opportuni algoritmi di modificazione dinamica dei pesi la rete
riesce ad adattare il proprio comportamento fino a computare una funzione
arbitraria y= f (x) in base agli esempi presentati.
Capacit� di generalizzare
Grazie al fatto che la risposta delle reti � continua (ad esclusione di un
numero finito di discontinuit�) il sistema che abbia correttamente appreso una
funzione riesce di norma a fornire una risposta "ragionevole" anche a stimoli
precedentemente mai occorsi
Approccio trasformazionale: un linguaggio viene definito come ottenuto
sottoponendo a una data trasformazione un altro linguaggio, tendenzialmente pi�
semplice. Fondamenti biologici
In quasi tutti gli organismi viventi sono presenti complesse organizzazioni di
cellule nervose, con compiti di riconoscimento delle configurazioni assunte
dall'ambiente esterno, memorizzazione e reazione agli stimoli provenienti dallo
stesso. Il cervello umano rappresenta probabilmente il pi� mirabile frutto
dell'evoluzione per le sue capacit� di elaborare informazioni. Al fine di
compiere tali operazioni, le reti biologiche si servono di un numero imponente
di semplici elementi computazionali (neuroni) fittamente interconnessi in modo
da variare la loro configurazione in risposta agli stimoli esterni: in questo
senso pu� parlarsi di ed i modelli artificiali cercano di catturare questo
tratto distintivo della biologia.
Tipicamente un � costituito di 3 parti principali: il (corpo cellulare), l'
(linea di uscita del neurone unica ma che si dirama in migliaia di rami) e il
(linea di entrata del neurone che riceve segnali in ingresso da altri assoni
tramite ). Il corpo cellulare fa una "somma pesata" dei segnali in ingresso. Se
il risultato eccede un certo valore di soglia allora il neurone si attiva ed �
prodotto un "potenziale di azione" che � mandato all'assone. Se il risultato non
eccede il valore di soglia, il neurone rimane in uno stato di riposo. Una rete
neurale artificiale riceve segnali esterni su uno strato di nodi (unit� di
elaborazione) d'ingresso, ciascuno dei quali � collegato con numerosi nodi
interni, organizzati in pi� livelli. Ogni nodo elabora i segnali ricevuti e
trasmette il risultato a nodi successivi.
Funzionamento di una rete neurale
Le reti neurali si basano principalmente sulla simulazione di artificiali
opportunamente collegati.
I suddetti neuroni ricevono in ingresso degli stimoli e li elaborano.
L'elaborazione pu� essere anche molto sofisticata ma in un caso semplice si pu�
pensare che i singoli ingressi vengano moltiplicati per un opportuno valore
detto peso, il risultato delle moltiplicazioni viene sommato e se la somma
supera una certa soglia il si attiva attivando la sua uscita. Il peso indica
l'efficacia sinaptica della linea di ingresso e serve a quantificarne
l'importanza, un ingresso molto importante avr� un peso elevato, mentre un
ingresso poco utile all'elaborazione avr� un peso inferiore. Si pu� pensare che
se due neuroni comunicano fra loro utilizzando maggiormente alcune connessioni
allora tali connessioni avranno un peso maggiore.
I singoli neuroni vengono collegati alla schiera di neuroni successivi, in modo
da formare una rete di neuroni. Normalmente una rete � formata da tre strati.
Nel primo abbiamo gli ingressi (I), questo strato si preoccupa di trattare gli
ingressi in modo da adeguarli alle richieste dei neuroni. Se i segnali in
ingresso sono gi� trattati pu� anche non esserci. Il secondo strato � quello
nascosto (H, hidden), si preoccupa dell'elaborazione vera e propria e pu� essere
composto anche da pi� colonne di neuroni. Il terzo strato � quello di uscita (O)
e si preoccupa di raccogliere i risultati ed adattarli alle richieste del blocco
successivo della rete neurale. Queste reti possono essere anche molto complesse
e coinvolgere migliaia di neuroni e decine di migliaia di connessioni.
una quantit� di studi e ricerche, e suscita un vivo interesse e notevoli
aspettative nella comunit� scientifica, destinate tuttavia ad essere
notevolmente ridimensionate allorch� nel mostrano i limiti operativi delle
semplici reti a due strati basate sui percettroni, e dimostrano l'impossibilit�
di risolvere per questa via molte classi di problemi, ossia tutti quelli non
caratterizzati da separabilit� lineare delle soluzioni: questo tipo di rete
neurale non � abbastanza potente, infatti non � in grado di calcolare neanche la
funzione or esclusivo (). Di conseguenza, a causa di queste limitazioni, ad un
periodo di euforia per i primi risultati della (come veniva chiamata negli ),
segue un periodo di diffidenza durante il quale tutte le ricerche in questo
campo non ricevono pi� alcun finanziamento dal governo degli ;le ricerche sulle
reti tendono, di fatto, a ristagnare per oltre un decennio, e l'entusiasmo
iniziale risulta fortemente ridimensionato.
L'algoritmo di apprendimento si basa sul metodo della che permette di trovare un
minimo locale di una funzione in uno a N . I pesi associati ai collegamenti tra
gli strati di neuroni si inizializzano a valori piccoli e casuali e poi si
applica la regola di apprendimento presentando alla rete dei pattern di esempio.
Queste reti neurali sono capaci di generalizzare in modo appropriato, cio� di
dare risposte plausibili per input che non hanno mai visto.
L'addestramento di une rete neurale di tipo BP avviene in due diversi stadi:
forward-pass e backward-pass. Nella prima fase i vettori in input sono applicati
ai nodi in ingresso con una propagazione in avanti dei segnali attraverso
ciascun livello della rete (forward-pass). Durante questa fase i valori dei pesi
sinaptici sono tutti fissati. Nella seconda fase la risposta della rete viene
confrontata con l'uscita desiderata ottenendo il segnale d'errore. L'errore
calcolato � propagato nella direzione inversa rispetto a quella delle
connessioni sinaptiche. I pesi sinaptici infine sono modificati in modo da
minimizzare la differenza tra l'uscita attuale e l'uscita desiderata (backward-pass).
Questo algoritmo consente di superare le limitazioni del percettrone e di
risolvere il problema della separabilit� non lineare (e quindi di calcolare la
funzione ), segnando il definitivo rilancio delle reti neurali, come
testimoniato anche dall'ampia variet� d'applicazioni commerciali: attualmente la
BP rappresenta un algoritmo di largo uso in molti campi applicativi.
Reti di Hopfield
Nel , il fisico pubblica un articolo fondamentale in cui presenta un modello
matematico comunemente noto appunto come rete di Hopfield: tale rete si
distingue per "l'emergere spontaneo di nuove capacit� computazionali dal
comportamento collettivo di un gran numero di semplici elementi d'elaborazione".
Le propriet� collettive del modello producono una memoria associativa per il
riconoscimento di configurazioni corrotte e il recupero di informazioni
mancanti.
Tra le nuove idee messe in luce da Hopfield, quella pi� degna di menzione
riguarda il capovolgimento del rapporto, fino allora esistente, tra calcolo e
numeri: mentre era universalmente noto che il calcolo producesse numeri, assai
meno banale era l'osservazione di Hopfield che, viceversa, anche i numeri
potessero spontaneamente generare calcolo, e che questo potesse emergere quale
attributo collettivo di sistemi interattivi siffatti.
Una rete ricorrente � un modello neurale in cui � presente un flusso
bidirezionale d'informazioni; in altri termini, mentre nelle reti di tipo
feedforward la propagazione dei segnali avviene unicamente, in maniera continua,
nella direzione che conduce dagli ingressi alle uscite, nelle reti ricorrenti
tale propagazione pu� anche manifestarsi da uno strato neurale successivo ad uno
precedente, oppure tra neuroni appartenenti ad uno stesso strato, e persino tra
un neurone e s� stesso.
Reti di Elman
Un significativo e noto esempio di semplice rete ricorrente � dovuto a (). Essa
costituisce una variazione sul tema del percettrone multistrato, con esattamente
tre strati e l'aggiunta di un insieme di neuroni "contestuali" nello strato
d'ingresso. Le connessioni retroattive si propagano dallo strato intermedio (e
nascosto) a tali unit� contestuali, alle quali si assegna peso costante e pari
all'unit�.
In ciascun istante, gli ingressi si propagano nel modo tradizionale e tipico
delle reti feedforward, compresa l'applicazione dell'algoritmo d'apprendimento
(solitamente la backpropagation). Le connessioni retroattive fisse hanno come
effetto quello di mantenere una copia dei precedenti valori dei neuroni
intermedi, dal momento che tale flusso avviene sempre prima della fase
d'apprendimento.
Gli algoritmi per il reinforcement learning tentano in definitiva di determinare
una politica tesa a massimizzare gli incentivi cumulati ricevuti dall'agente nel
corso della sua esplorazione del problema. L'apprendimento con rinforzo
differisce da quello supervisionato poich� non sono mai presentate delle coppie
input-output di esempi noti, n� si procede alla correzione esplicita di azioni
subottimali. Inoltre, l'algoritmo � focalizzato sulla prestazione in linea, la
quale implica un bilanciamento tra esplorazione di situazioni ignote e
sfruttamento della conoscenza corrente.
Algoritmo di Backpropagation
L'algoritmo di backpropagation � utilizzato nell'apprendimento con supervisione.
Esso permette di modificare i pesi delle connessioni in modo tale che si
minimizzi una certa funzione errore E. Tale funzione dipende dal vettore h-esimo
di output restituito dalla rete, dato il vettore h-esimo di ingresso e dal
vettore h-esimo di output che noi desideriamo (che fa parte del training set).
Il training set � dunque un insieme di N coppie di vettori , con h = 1,...,N. La
funzione errore che si deve minimizzare si pu� scrivere come: , dove l'indice k
rappresenta il valore corrispondente al k-esimo neurone di output. E � una
funzione dipendente dai pesi (che in generale variano nel tempo). Per
minimizzare E(w) si pu� usare l'algoritmo della (gradient-descent). L'algortimo
parte da un punto generico e calcola il gradiente . Il gradiente d� la direzione
verso cui muoversi lungo la quale ho il massimo incremento (o decremento se
considero ). Definita la direzione ci si muove di una distanza � predefinita a
priori e si trova un nuovo punto sul quale � calcolato nuovamente il gradiente.
Si continua iterativamente finch� il gradiente non � nullo. L'algoritmo di
backpropagation pu� essere diviso in due passi:
Forward pass: l'input dato alla rete � propagato al livello successivo e cos�
via ai livelli successivi (il flusso di informazioni si sposta in avanti, cio�
forward). Si calcola dunque E(w), l'errore commesso.
Backward pass: L'errore fatto dalla rete � propagato all'indietro (backward) e i
pesi sono aggiornati in maniera appropriata.
Durante la fase di addestramento si costruisce la mappa, pertanto la rete si
configura ed organizza tramite un processo competitivo. Alla rete deve essere
fornito il numero pi� grande possibile di vettori in ingresso, tali da
rappresentare fedelmente la tipologia di vettore che le sar� eventualmente
sottoposta nella seconda fase;
nel corso della seconda fase ogni nuovo vettore d�ingresso pu� essere
velocemente classificato o categorizzato, collocandolo in automatico sulla mappa
ottenuta nella fase precedente. Vi sar� sempre un unico neurone vincente, quello
il cui vettore dei pesi giace a minor distanza dal vettore appena sottoposto
alla rete; tale neurone pu� essere determinato semplicemente calcolando la
distanza euclidea tra i due vettori in questione.
Pregi
Le reti neurali per come sono costruite lavorano in parallelo e sono quindi in
grado di trattare molti dati. Si tratta in sostanza di un sofisticato sistema di
tipo statistico dotato di una buona immunit� al ; se alcune unit� del sistema
dovessero funzionare male, la rete nel suo complesso avrebbe delle riduzioni di
prestazioni ma difficilmente andrebbe incontro ad un blocco del sistema. I
software di ultima generazione dedicati alle reti neurali richiedono comunque
buone conoscenze statistiche; il grado di apparente utilizzabilit� immediata non
deve trarre in inganno, pur permettendo all'utente di effettuare da subito
previsioni o classificazioni, seppure con i limiti del caso. Da un punto di
vista industriale, risultano efficaci quando si dispone di dati storici che
possono essere trattati con gli algoritmi neurali. Ci� � di interesse per la
produzione perch� permette di estrarre dati e modelli senza effettuare ulteriori
prove e sperimentazioni.
Difetti
I modelli prodotti dalle reti neurali, anche se molto efficienti, non sono
spiegabili in linguaggio simbolico umano: i risultati vanno accettati "cos� come
sono", da cui anche la definizione inglese delle reti neurali come "black box".
Come per qualsiasi algoritmo di modellazione, anche le reti neurali sono
efficienti solo se le variabili predittive sono scelte con cura. Non sono in
grado di trattare in modo efficiente variabili di tipo categorico (per esempio,
il nome della citt�) con molti valori diversi. Necessitano di una fase di
addestramento del sistema che fissi i pesi dei singoli Neuroni e questa fase pu�
richiedere molto tempo, se il numero dei record e delle variabili analizzate �
molto grande. Non esistono teoremi o modelli che permettano di definire la rete
ottima, quindi la riuscita di una rete dipende molto dall'esperienza del
creatore.
AGIRE IN MODO RAZIONALE

Agire in modo
razionale
Agire razionalmente significa agire per raggiungere i propri obiettivi, date le
proprie credenze. Un agente � proprio qualcosa che percepisce e agisce. In
questo approccio l'AI � vista come lo studio e la costruzione di agenti
razionali. Nell'approccio all'AI basato sul 'pensare razionalmente' l'enfasi
veniva totalmente posta sulle inferenze corrette. Talvolta, fare inferenze
corrette fa parte dell'essere un agente razionale, perch� un modo di agire
razionalmente consiste nel ragionare logicamente fino a concludere che una certa
azione possa raggiungere i propri obiettivi, e quindi agire sulla base di tale
conclusione. D'altro canto, un'inferenza corretta non � completamente razionale,
perch� esistono spesso situazioni in cui non c'� alcuna cosa da fare che si
riesce a dimostrare corretta, anche se bisogna fare comunque qualcosa. Ci sono
anche modi di agire razionalmente in cui non si pu� dire ragionevolmente che
siano coinvolte delle inferenze. Ad esempio, ritrarre la propria mano da un
fornello caldo � un riflesso condizionato che ha maggior successo di un'azione
pi� lenta compiuta dopo un'attenta deliberazione. Tutte le "capacit� cognitive"
necessarie per il test di Turing sono utili per consentire azioni razionali.
Perci�, abbiamo bisogno delle capacit� di rappresentare la conoscenza e di
ragionarci perch� questo ci consente di pervenire a decisioni buone in un'ampia
variet� di situazioni. Dobbiamo essere in grado di comporre frasi comprensibili
in linguaggio naturale perch� utilizzare queste frasi ci aiuta a vivere in una
societ� complessa. Abbiamo bisogno dell'apprendimento, non solo per erudizione,
ma perch� avere un'idea migliore di come funziona il mondo ci rende in grado di
generare strategie pi� efficaci per interagire con esso. Abbiamo bisogno della
percezione visiva, non solo perch� vedere � divertente, ma per avere un'idea
migliore di cosa si possa raggiungere attraverso un' azione (per esempio, essere
in grado di vedere un cibo appetitoso rappresenta uno stimolo per raggiungerlo).
Lo studio dell' AI vista come progettazione di un agente razionale presenta
quindi due vantaggi. Innanzitutto, � pi� generale dell'approccio del "pensare
razionalmente" perch� fare delle inferenze corrette � solo un meccanismo utile,
ma non necessario, per raggiungere la razionalit�. In secondo luogo � pi�
riconducibile allo sviluppo scientifico rispetto agli approcci basati sull
"agire come un essere umano" o sul "pensare come un essere umano" perch� lo
standard della razionalit� � definito chiaramente ed � completamente generale.
Bisogna considerare un punto importante: raggiungere la perfetta razionalit� non
� sempre possibile soprattutto in ambienti complessi ove le richieste
computazionali sono troppo elevate; in molti casi � opportuno agire con
'razionalit� limitata' cio� agire in modo appropriato quando non c'� abbastanza
tempo per fare tutti i calcoli che si desidera.
Le altre discipline
l'AI sia di per s� una disciplina giovane, ha ereditato molte idee, punti di
vista e tecniche da altre discipline. Dalla tradizione filosofica sono emerse
teorie del ragionamento e dell'apprendimento, insieme al punto di vista per cui
la mente � concepita come un meccanismo fisico che:
� opera principalmente attraverso il ragionamento sulla conoscenza che contiene,
� esegue connessioni tra la conoscenza e l'azione,
� giustifica le azioni intraprese,
� acquisisce nuova conoscenza dall'esperienza.
Dalla matematica sono state acquisite teorie formali sulla logica (in
particolare sulla logica del primo ordine usato oggi come maggior sistema di
base per la rappresentazione della conoscenza), sulla probabilit�, su come
prendere decisioni e sul calcolo. Dalla psicologia, si hanno gli strumenti con
cui investigare la mente umana e un linguaggio scientifico con il quale
esprimere le teorie risultanti. Dalla linguistica, sono emerse teorie sulla
struttura e sul significato del linguaggio nonch� sull'importanza del linguaggio
per rappresentare la conoscenza. Dall'informatica, si hanno strumenti attraverso
cui fare dell'AI una realt�. L'elaboratore elettronico � ritenuto all'unanimit�
il sistema artificiale con le migliori possibilit� di dimostrare intelligenza.
Con il progresso della ricerca IA e lo sviluppo di tecniche per trattare una
quantit� maggiore di conoscenza sul mondo, si � verificato qualche progresso per
quanto riguarda i compiti appena descritti e si sono potuti ragionevolmente
affrontare nuovi compiti. Fra questi, si possono includere la percezione
(visione e discorso), la comprensione del linguaggio naturale, e la risoluzione
di problemi in domini specializzati, come la diagnosi medica e l'analisi
chimica. Attivit� come la percezione e la comprensione del linguaggio sono
affrontate normalmente quasi da tutti. Oltre a questi compiti quotidiani, molte
persone svolgono altre attivit� intelligenti in cui sono esperte. Queste cose
come (come ad esempio diagnosticare malattie) sono spesso considerate pi�
difficili dei compiti quotidiani poich� solo alcune persone sono in grado di
farle. Numerosi problemi di questo tipo si sono dimostrati risolubili da parte
di programmi denominati sistemi esperti. Tratteremo i sistemi esperti
successivamente, per ora ci basta far notare che un sistema esperto � un
programma che simula il modo di operare di un essere umano: ad esempio un medico
che diagnostica una malattia, un chimico che analizza dati di laboratorio, un
ingegnere che progetta un impianto industriale. I sistemi esperti si basano su
tecniche di sviluppo e di programmazione tipiche dell'AI, che consentono di
affrontare con successo problemi troppo ardui per l'informatica tradizionale. In
genere si tratta di sistemi di grande complessit�, che fino a pochi anni fa
richiedevano risorse di calcolo molto costose. Tuttavia, il crollo dei prezzi
dello hardware, dovuto alla tecnologia di integrazione su larga scala, ha
cambiato radicalmente la situazione. Oggi esistono sistemi esperti di rilevante
interesse applicativo che funzionano su stazioni di lavoro di costo
relativamente basso, dell'ordine di qualche decina di milioni di lire. Questo
fatto, insieme con il consolidarsi e il. diffondersi delle metodologie dell'AI
ha portando ad un sempre maggiore interesse verso i sistemi esperti. �
VISIONE ARTIFICIALE


Visione
artificiale
La Visione artificiale � l'insieme dei processi che mirano a creare un modello
approssimato del mondo reale (3D) partendo da immagini bidimensionali (2D). Lo
scopo principale della visione artificiale � quello di riprodurre la vista
umana.
Un � costituito dall�integrazione di componenti ottiche, elettroniche e
meccaniche che permettono di acquisire, registrare ed elaborare immagini sia
nello spettro della luce visibile che al di fuori di essa (infrarosso,
ultravioletto, raggi X, ecc.).
Il risultato dell�elaborazione � il riconoscimento di determinate
caratteristiche dell�immagine per varie finalit� di controllo, classificazione,
selezione, ecc.
Queste definizioni indicano quindi quattro possibili obiettivi da perseguire in
intelligenza artificiale e storicamente, sono stati seguiti tutti e quattro gli
approcci:
Sistemi che pensano come gli esseri umani Sistemi che pensano razionalmente
Sistemi che operano come gli esseri umani
Sistemi che agiscono razionalmente
Come ci si pu� aspettare, c'� un contrasto tra gli approcci basati sugli esseri
umani e quelli basati sulla razionalit�. Un approccio centrato sull'uomo deve
costituire una scienza empirica, che comporta ipotesi e conferme sperimentali.
Un approccio razionalista comporta una combinazione di matematica ed ingegneria.
Le persone di ciascun gruppo talvolta denigrano il lavoro fatto negli altri
gruppi, ma la verit� � che tutte le direzioni hanno prodotto dei risultati di
valore.
Se vogliamo dire che un dato programma pensa come un essere umano, dobbiamo
avere un modo per determinare come pensano gli esseri umani ed entrare nei
meccanismi reali delle menti umane. Ci sono due modi per fare questo: attraverso
l'introspezione, cercando di afferrare i nostri stessi pensieri man mano che
vengono formulati, o attraverso esperimenti psicologici. Una volta acquisita una
teoria sufficientemente precisa della mente, diviene possibile esprimere la
teoria come un programma. Se il comportamento di ingresso/uscita e di
temporarizzazione del programma si uniformano al comportamento umano, viene
fornita l'evidenza che alcuni dei meccanismi del programma possono operare anche
negli esseri umani. Newell e Simon, che hanno sviluppato ne 1961 GPS, "General
Problem Solver" (dall'inglese, risolutore generale di problemi), non si
accontentarono che il loro programma risolvesse correttamente i problemi, ma
piuttosto erano interessati a confrontare la traccia dei passi del suo
ragionamento con le tracce di soggetti umani che risolvevano gli stessi
problemi. Ci� � in contrasto con altri ricercatori dello stesso periodo che
erano interessati ad ottenere le risposte giuste senza preoccuparsi di come
potessero farlo gli esseri umani. Il campo interdisciplinare della scienza
cognitiva mette insieme modelli informatici dell'AI e tecniche sperimentali
della psicologia per tentare di costruire teorie dei meccanismi della mente
umana verificabili. L'AI e la scienza cognitiva continuano a fertilizzarsi a
vicenda, soprattutto nelle aree della visione, del linguaggio naturale e
dell'apprendimento.
AGIRE COME UN ESSERE UMANO


E� POSSIBILE
COSTRUIRE MACCHINE CHE
PRODUCONO LE FUNZIONALITA� DELLA MENTE?
E' possibile riprodurre artificialmente le funzioni dell'intelligenza umana,
costruire macchine che sappiano svolgere gli stessi compiti solitamente affidati
all'uomo (secondo l'ipotesi debole dell'intelligenza artificiale)? E' poi
possibile riprodurre artificialmente non solo le funzioni, ma anche gli stessi
procedimenti dell'intelligenza umana (come sostiene l'ipotesi forte
dell'intelligenza artificiale)?
Se una di queste due cose � possibile, si pu� costruire una macchina
intelligente, e in questo caso (specie se anche la seconda ipotesi �
realizzabile) diventa probabile che la stessa intelligenza umana si basi
ultimamente su meccanismi analoghi a quelli di una macchina intelligente, e che
il suo funzionamento sia spiegabile meccanicisticamente.
Viceversa, se si dovesse accertare che l'intelligenza umana ha basi meccaniche,
diverrebbe assai probabile che si possano costruire meccanismi in grado di
imitarla. La discussione sull'intelligenza artificiale pu� dunque partire da
tesi sulle possibilit� della tecnologia per giungere a tesi sull'antropologia, o
viceversa. Nel percorso sono coinvolte informatica, psicologia, neurologia e
filosofia della mente.
Tradizionalmente l'intelligenza � stata considerata una prerogativa dell'anima
umana, sicch� n� animali n� macchine, in quanto privi di anima, avrebbero potuto
esserne dotati. Anche nei secoli passati, tuttavia, si sono avute tesi
divergenti rispetto a questa credenza generalizzata, tesi alla luce delle quali
l'intelligenza artificiale si sarebbe potuta considerare possibile. Cruciale, a
questo riguardo, � la questione del rapporto tra anima e corpo: data la loro
radicale eterogeneit� (spirituale l'una, materiale l'altro), si tratta di
spiegare come l'anima possa agire sul corpo (ad esempio facendolo muovere in un
modo piuttosto che in un altro) e il corpo sull'anima (ad esempio producendo in
essa sensazioni). Gi� dai secoli passati si sono quindi delineate due strategie:
o postulare una connessione garantita dall'esterno (ad esempio per opera
divina), oppure attenuare o eliminare la radicale eterogeneit� dei due elementi.
Si pu� ad esempio:
(a) negare l'esistenza del corpo e mantenere solo l'anima, o viceversa
(b) negare l'anima attribuendone tutte le funzioni al corpo, o pi� semplicemente
(c) rinunciare a considerarla come sostanza separata, presentandola invece come
funzione o manifestazione dell'attivit� corporea.
Le prospettive (b) e (c) implicano la convinzione che un oggetto materiale
sufficientemente complesso e articolato come il corpo possa svolgere le funzioni
dell'anima o dar vita all'anima come manifestazione di s� (volendo poi precisare
meglio tale idea, come i progressi della ricerca consentivano di fare gi� ai
pensatori del Seicento, al posto del corpo si pu� parlare del cervello, o come
oggi si preferisce, del sistema nervoso centrale). Tale concezione, a sua volta,
rende possibile pensare che animali e macchine, dotati di un cervello o di
organi analoghi, possano pertanto sentire, pensare, ed essere intelligenti.
Ecco l'importanza per la discussione sull'intelligenza artificiale del
tradizionale problema filosofico dei rapporti tra anima e corpo, o come oggi pi�
comunemente si dice, tra mente e corpo o tra mente e cervello ( il termine
mente, infatti, � meno carico di presupposizioni teologiche e metafisiche, e pur
denotando il complesso di tutte le possibili manifestazioni della vita psichica
(sensazioni, sentimenti, pensieri, volizioni ...) non implica di per s� l'idea
di una sostanza separata).
Il lungo dibattito su tale problema ha comunque mostrato che la coscienza
(intesa come consapevolezza soggettiva di sensazioni, pensieri, emozioni, o dei
loro contenuti), pur essendo l'aspetto pi� caratteristico della vita mentale, �
anche quello che pi� difficilmente si potrebbe pensare di riprodurre in una
macchina.
Si pu� allora parlare di intelligenza artificiale anche senza chiedersi se le
macchine possano avere una mente, ma solo se esse possano svolgere quelle
particolari funzioni della mente che hanno a che fare con l'intelligenza; in
altri termini, si pu� pensare a una macchina intelligente, ma priva di
sensazioni, emozioni, e in sintesi di coscienza.
ESEMPIO
Lezione in classe; lettura a casa almeno di brani antologici selezionati, e se
con maggior disponibilit� di tempo singole opere o articoli; susseguente
discussione in classe. Gli studenti sono stimolati (e possono essi stessi
stimolare il docente) al confronto con quanto suggerito dall�esperienza che
stanno compiendo parallelamente di programmazione per il problem-solving: in che
senso le piccole �macchine� che stanno costruendo (i programmi che scrivono)
pensano? In che senso sono intelligenti? A che condizioni si potrebbe parlare di
una �mente� di tali macchine?
Estratto da ""
REALTA' VIRTUALE


REALTA� VIRTUALE
Un'adeguata rappresentazione dell'ambiente circostante � uno degli aspetti
salienti degli esseri adattativi. Il modo in cui un essere adattativo costruisce
ed una una rappresentazione interna dello spazio dipende dalle sue competenze
rappresentazionali e dal tipo di interazione occorsa fra il soggetto e
l'ambiente. E' ragionevole assumere che il modo in cui un soggetto interagisce
con l'ambiente influenza la sua rappresentazione.
Nel testare delle ipotesi concernenti la rappresentazione dell'ambiente �
necessario affrontare molteplici problemi pratici: � necessario condurre gli
esperimenti in ambienti non noti ai soggetti. Gli edifici sono arredati e dunque
dispongono di etichette e landmarks che, sotto il profilo sperimentale, possono
risultare problematici. Gli edifici devono essere abbastanza complessi da
richiedere una rappresentazione non banale e, durante le sessioni sperimentali,
devono essere disabitati.
Ulteriori problemi emergono durante l'esperimento: i movimenti, le azioni ed i
comportamenti dei soggetti non possono essere registrati con precisione, e
possono venire raccolti solo rincorrendo i soggetti. La traduzione dei dati
raccolti in formato elettronico richiede infine un lavoro considerevole.
Gli ambienti di realt� virtuale possono costituire la soluzione di molti dei
problemi delineati. I ricercatori possono creare edifici su misura per
l'esperimento, arredandoli in maniera adeguata al disegno sperimentale. I
soggetti possono liberamente navigare, esplorare, cercare: il software
dell'ambiente virtuale pu� registrare movimenti ed azioni con la risoluzione
temporale e spaziale desiderata. E' infine possibile creare tipi di interazioni
che nella realt� non possono esistere.
Vi sono, naturalmente, alcuni problemi: l'interazione di un soggetto in un
ambiente virtuale � tuttora molto diversa dall'immersione in uno spazio reale:
nella realt� virtuale la percezione � pi� povera, il feedback � limitato e la
navigazione immersiva pu� causare malessere: lo sviluppo tecnologico sta
comunque migliorando la qualit� ed il realismo dell'interazione immersiva,
rendendo la realt� virtuale uno strumento estremamente promettente.
Il software e gli applicativi dedicati alla realt� virtuale presenti sul
mercato, pur se estremamente potenti e sofisticati, non sono naturalmente stati
progettati per la creazione di settings sperimentali, e buona parte delle
funzioni e procedure specifiche necessarie alla realizzazione di un esperimento
di psicologia cognitiva dev'essere programmato ex novo.
La costruzione di un setting sperimentale pu� essere concettualmente divisa in
tre filoni principali: creare l'ambiente, gestire l'interazione del soggetto,
registrarne le azioni.
ROBOTICA


ROBOTICA
La robotica � una scienza che, studiando i comportamenti degli esseri
intelligenti, cerca di sviluppare delle metodologie che permettano ad una
macchina (), dotata di opportuni dispositivi atti a percepire l'ambiente
circostante ed interagire con esso quali e , di eseguire dei compiti specifici.
� una disciplina relativamente nuova, che affonda le sue radici nell'antico
desiderio dell' di costruire strumenti che possano liberarlo da compiti troppo
faticosi, noiosi o pericolosi. Anche se la robotica � una branca dell' in essa
confluiscono gli studi di molte discipline sia di natura umanistica come , , e
che scientifica quali , , , , e
La scienza robotica proprio in virt� della sua natura trova applicazioni in
molteplici contesti, questo ha fatto s� che nascessero varie sotto-discipline
fra le quali per� raramente esiste una netta linea di demarcazione.
Robotica utilizzata sia per creare nuove forme di sia per imitare e riprodurre
le forme artistiche gia esistenti come i robot progettati per o per suonare uno
strumento musicale analizzando in uno .
Robot usati in campo medico
Automazione applicata all'ambiente domestico, tra gli sviluppi a breve termine
pi� interessanti ci sono le tecnologie di aiuto in casa ai portatori di mentali
o fisici.
� si occupa dello studio e della diffusione di piccoli robot a basso costo
utilizzati per scopi educativi o ludici
� ramo della robotica molto vasto comprende diversi tipi di robot; si va infatti
dai robot capaci di assitere il medico durante le operazioni chirugiche a quelli
che tramite tecnologie di permettono al medico di operare a distanza. Rientrano
nella categoria anche le sofisticate apparecchiature per analisi biologiche
utilizzate nei laboratori
� si occupa delle tecnologie utilizzate nei parchi tematici, nei musei o negli
effetti speciali cinematografici per intrattenere ed educare grandi quantit� di
pubblico; un esempio di utilizzo sono gli spesso utilizzati per riprodurre le
fattezze di personaggi fantastici o di specie animali oggi come i dinosauri.
� metodologia che attraverso lo studio di tenta di realizzare robot sempre pi�
versatili in modo da rendere meno essenziale il supporto umano.
il campo industriale � sicuramente quello in cui i robot hanno trovato maggiore
diffusione il loro impiego nelle ha permesso alle aziende di abbattere
notevolmente i costi accelerando e migliorando la produzione. Fra i robot pi�
utilizzati dall'industria vi � il o costruito a imitazione del braccio umano ma
spesso dotato di pi� � una macchina molto versatile che si presta a svariate
mansioni tra cui verniciatura, saldatura o montaggio. Interessante notare come
questa tipologia di macchine sia spesso utilizzata per produrre altri robot
simili rendendo le speculazioni fatte dalla sulle un discorso molto pi� vicino
alla nostra quotidianit�.
Anche se la fantascienza � ricca di riferimenti a robot utilizzati in ambito
militare nel pratico questi sono utilizzati pi� che altro con scopi di
ricognizione e vigilanza fra i quali troviamo ad esempio gli aerei privi di
equipaggio detti . Questo tipo di veicoli � s� controllato a distanza da
personale apposito ma in caso di emergenza pu� anche compiere diversi compiti in
totale autonomia permettendo la ricognizione di teatri di guerra pesantemente
difesi senza mettere a repentaglio vite umane. Altro esempio di robotica
militare sono i che sono in grado, grazie al numeroso set di strumenti di cui
sono muniti, di compiere analisi su un ordigno ed eventualmente neutralizzarlo a
distanza riducendo drasticamente i rischi per gli .
cerca di sviluppare tecnologie che rendano i robot sempre pi� capici di
interagire e comunicare con gli esseri umani in modo autonomo.
Anche se sviluppa tecnologie e metodiche destinate all'impiego di robot fuori
dall'atmosfera terrestre questo settore della robotica ha raggiunto dei
risultati utili anche in campi che esulano dalla ricerca spaziale. Esempi di
questi robot sono le sonde esplorative impiegate in diversi missioni sui pianeti
del sistema solare ma anche robot pi� tradizionali come il famoso braccio
manipolatore dello o quello di sembianze umane destinato alla che verr�
utilizzato in sostituzione degli austronauti nelle spedizioni spaziali.
Nel linguaggio comune, un robot � un'apparecchiatura artificiale che esegue
compiti su comando (o programma), sia in base ad una supervisione diretta
dell'uomo, sia autonomamente basandosi su linee guida generali, magari usando
processi di ; questi compiti tipicamente dovrebbero essere performati al fine di
sostituire o coadiuvare l'uomo, come ad es. nella fabbricazione, costruzione,
manipolazione di materiali pesanti e pericolosi, o in ambienti proibitivi o non
compatibili con la condizione umana o semplicemente per liberare l'uomo da
impegni.
Un robot cos� definito, dovrebbe essere dotato di connessioni guidate dalla tra
percezione e azione, e non dal controllo umano diretto. L'azione pu� prendere la
forma di motori elettro-magnetici, o , che muovono un arto, aprono e chiudono
una pinza, o fanno deambulare il robot. Il controllo passo-passo e la
retroazione sono forniti da un che viene eseguito da un esterno o interno al
robot, o da un . In base a questa definizione, il concetto di robot pu�
comprendere quasi tutti gli apparati automatizzati.
In alternativa, il termine robot viene usato per indicare un essere artificiale,
un o , che replichi e somigli ad un animale (reale o immaginario) o ad un uomo.
Il termine ha finito per essere applicato a molte macchine che sostituiscono
direttamente un umano o un animale, nel lavoro o nel gioco. In questo modo, un
robot pu� essere visto come un tentativo di . L' � forse ci� che ci rende cos�
riluttanti a riferirci a una moderna e complessa lavatrice, come a un robot.
Comunque, nella comprensione moderna, il termine implica un grado di autonomia
che escluderebbe molte macchine automatiche dal venire chiamate robot. Si tratta
di una ricerca per robot sempre pi� autonomi, il che � il maggiore obbiettivo
della ricerca robotica e il motivo che guida gran parte del lavoro sull'..
Origine del termine robot
Il termine robot deriva dal termine robota, che significa "lavoro pesante" o
"lavoro forzato". L'introduzione di questo termine si deve allo scrittore ceco ,
il quale us� per la prima volta il termine nel nel suo dramma teatrale . In
realt� non fu il vero inventore della parola, la quale infatti gli venne
suggerita dal fratello , scrittore e pittore cubista, il quale aveva gi�
affrontato il tema in un suo racconto del , ("L'ubriacone"), nel quale per�
aveva usato il termine automat, "". La diffusione del romanzo di , molto
popolare sin dalla sua uscita, serv� a dare fama al termine Robot.
Anche se i robot di Čapek erano uomini artificiali , la parola robot viene quasi
sempre usata per indicare un uomo meccanico. Il termine (dal greco an�r, andr�s,
"uomo", e che quindi pu� essere tradotto "a forma d'uomo") pu� essere usato in
entrambi i casi, mentre un ("organismo cibernetico" o "uomo ") indica una
creatura che combina parti organiche e meccaniche.
Il termine "robotica" venne usato per la prima volta (su carta stampata) nel
racconto di intitolato Circolo vizioso (Runaround, ), presente nella sua famosa
raccolta . In esso, egli citava le tre regole della robotica, che in seguito
divennero le (poi accresciute a quattro con l'introduzione della Legge Zero). �
probabile che in un prossimo futuro queste leggi entreranno effettivamente a
fare parte del set di istruzioni dei robot complessi
Il primo progetto documentato di un robot umanoide venne fatto da attorno al .
Degli appunti di Da Vinci, riscoperti negli , contengono disegni dettagliati per
un cavaliere meccanico, che era apparentemente in grado di alzarsi in piedi,
agitare le braccia e muovere testa e mascella. Il progetto era probabilmente
basato sulle sue ricerche anatomiche registrate nell . Non si sa se tent� o meno
di costruire il robot (vedi: ).
Il primo robot funzionante conosciuto venne creato nel da , che fabbric� un
androide che suonava il , cos� come un'anatra meccanica che, secondo le
testimonianze, mangiava e defecava. Nel racconto breve di E.T.A. Hoffmann L'uomo
di sabbia () compariva una donna meccanica a forma di bambola, nel racconto ()
indic� l'invenzione dei robot (da lui chiamati 'omuncoli', 'uomini di seconda
mano' o 'esseri ausiliari') come l'invenzione pi� notevole della storia
dell'umanit�, e in Steam Man of the Prairies () Edward S. Ellis espresse l'affascinazione
americana per l'industrializzazione. Giunse un'ondata di storie su automi
umanoidi, che culmin� nell' Uomo elettrico di , nel .
Una volta che la tecnologia avanz� al punto che la gente intravedeva delle
creature meccaniche come qualcosa pi� che dei giocattoli, la risposta letteraria
al concetto di robot riflett� le paure che gli esseri umani avrebbero potuto
essere rimpiazzati dalle loro stesse creazioni. (), che viene spesso definito il
primo romanzo di fantascienza, � divenuto un sinonimo di questa tematica. Quando
il dramma di Čapek, R.U.R., introdusse il concetto di una catena di montaggio
operata da robot che costruivano altri robot, il tema prese delle sfumature
politiche e filosofiche, ulteriormente disseminate da film classici come (), il
popolare (), () e () .
Nella introduzione al suo romanzo , Asimov ha detto di avere fatto in tale serie
"Il primo uso della parola robotica nella storia del mondo, per quanto ne so."
ANDROIDE
L'androide � un essere artificiale, un , con sembianze umane (il termine deriva
dal greco an�r, andr�s, "uomo", e quindi pu� essere tradotto "a forma d'uomo")
presente soprattutto nell'immaginario . In taluni casi l'androide pu� risultare
indistinguibile dall'. Differisce dal , il quale � costituito da parti
biologiche oltre che artificiali.
Il corrispettivo femminile del termine androide � l'assai poco frequente .
Presente soprattutto nell'immaginario , il termine cyborg o organismo bionico
indica un essere di forma costituito da un insieme di organi artificiali e
organi . Nasce dalla contrazione dell'inglese cybernetic organism, .
Il confine tra essere umano e cyborg � sempre pi� sfumato, basti pensare ai
progressi delle tecnologie applicate alle e agli organi artificiali: una persona
dotata di un potrebbe infatti gi� corrispondere alla definizione di cyborg.
A seconda della loro origine, � tuttavia possibile distinguere i cyborg in due
categorie:
1. Esseri umani potenziati. Pu� trattarsi di un essere umano che ha subito
consistenti modificazioni ed innesti. Esempio: il protagonista del film � un
poliziotto che, ucciso in servizio, viene fatto resuscitare in forma di cyborg.
2. , cio� robot umanoidi, provvisti di apporti biologici, spesso allo scopo di
aumentare la loro somiglianza con l'essere umano. � il caso del cyborg assassino
protagonista del film () e dei due seguiti.
la tendenza naturale degli esseri umani � quella di ricostruirsi attraverso la
tecnologia allo scopo di distinguersi dalle altre forme biologiche del pianeta:
un progetto che parte dalle prime forme di manipolazione del e continua oggi con
l'utilizzo di protesi tecnologiche e lo sviluppo dell'. Il desiderio di
migliorare ci� che ha determinato la natura, sarebbe alle origini stesse della
cultura umana.
Letteratura
La fusione tra uomo e macchina, cantata dai poeti e artisti del gi� prima
dell'invenzione della , � un'ossessione condivisa particolarmente dagli
scrittori del filone fantascientifico , nato nei primi : i personaggi dei
romanzi di , ad esempio, sono spesso dotati di innesti artificiali che ne
potenziano la forza ed altre capacit�. L'icona in questo caso � Molly, la
guardia del corpo dotata di riflessi potenziati e fibre muscolari artificiali,
che si � fatta togliere gli occhi per sostituirli con delle inquietanti lenti a
specchio saldate alle orbite oculari.
TELEROBOTICA


TELEROBOTICA PER
INTERVENTI CHIRURGICI
Le ricerche svolte riguardano realizzazione di un sistema per il telecontrollo
di un robot composto da:
- stazione di controllo dove il teleoperatore pilota gli spostamenti del robot
remoto tramite un mouse disponendo di tre telecamere che inquadrano la scena.
- stazione operativa composta da un elaboratore di controllo della comunicazione
e da un robot.
Le ricerche sono state svolte utilizzando:
- stazione di telecontrollo
- personal computer WIN SERVER 2005 compatibile
-r basato su microprocessore PC INTE PENTIUM 9.7Ghb-Video3D
- Windows VISTA/UNIX
- robot MICROSOFT 7575
- linguaggio XML/Unix LINUX
Il sistema e' stato utilizzato durante il congresso Roma Chirurgia '05
telecontrollando il robot posto in una sala chirurgica del Policlinico Umberto I
di Roma da Milano via sat,inoltre tale siatema � stato usato durante un'intertento
delicatissimo nel 2006 in collegamento via sat Clinica Gemelli di Roma e
Universital Ospital NYC,con risultati sbalorditivi mai visti prima ,l'intervento
riuscito brillantemente � stato solo l'inizio di una lunga e innovativa svolta
in questo millenio,altri interventi chirurgici di spicco si sono verificati
tutti con le stesse metodiche e con risultati ottimi.