Overview - Inverse kinematics
This page shows the implementation of Closed Loop Inverse
Kinematics functions.
-
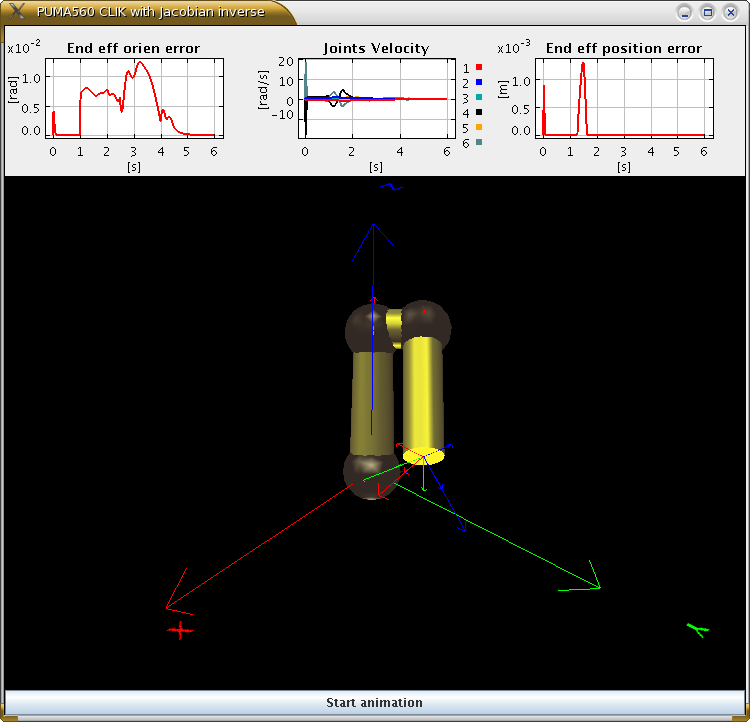
CLIK for robot
PUMA 560 through singular configuration.
-
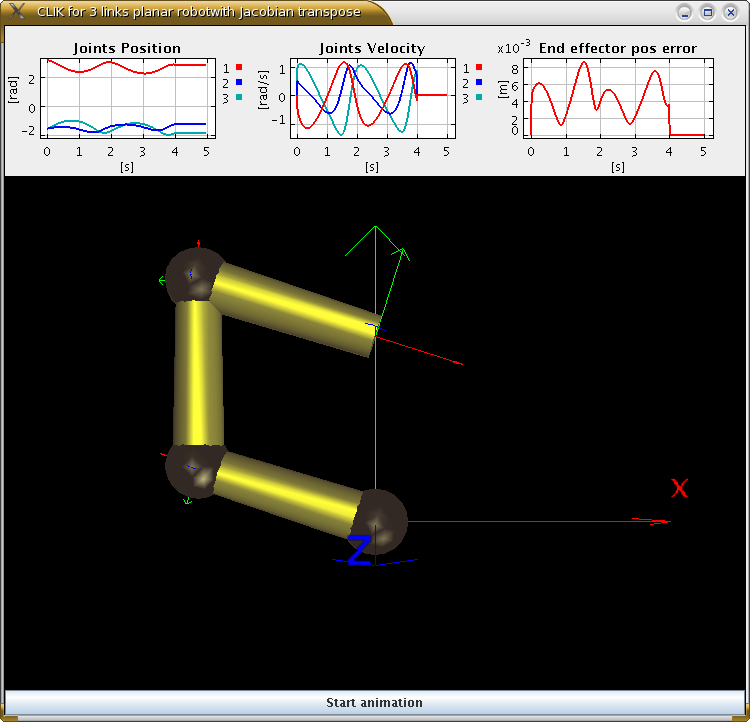
CLIK for 3
links planar robot with jacobian transpose.
-
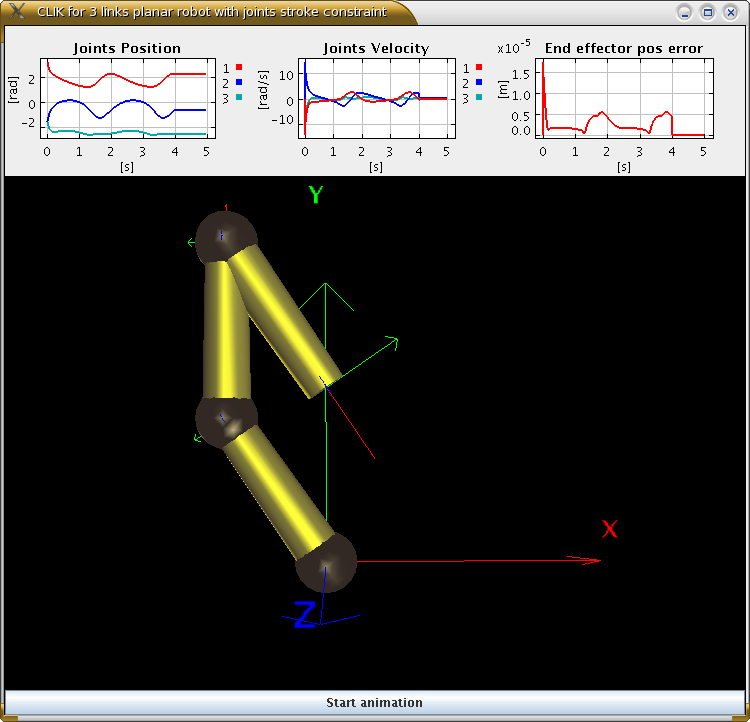
CLIK for 3
links planar robot with joints stroke constraint.
-
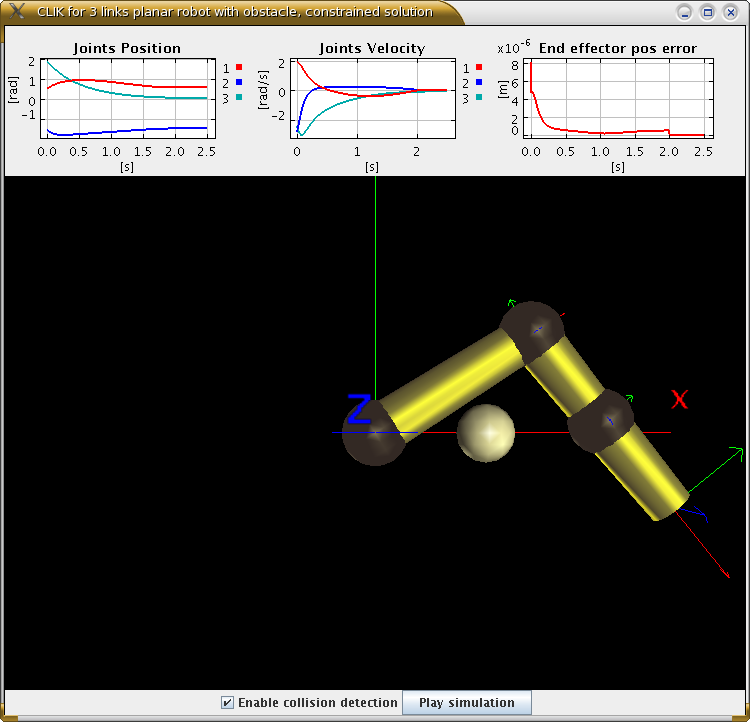
CLIK for 3
links planar robot with obstacle. Solution of problem
3.20 from «Modelling and Control of
Robot Manipulators» by Sciavicco, Siciliano(2nd
Edition).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}