|
CONTROLLARE LA VELOCITÀ DEI MOTORI
|
|||||||||||||||
|
Di solito, durante la marcia (o retromarcia) è molto difficile che il minirobot vada esattamente in linea retta, senza derivare a destra o a sinistra. Questo accade perché i due motori, che costituiscono un sistema di guida differenziale, non sono sincronizzati e le ruote girano a velocità diverse. Dunque se vogliamo controllare l'andatura del nostro robot, dobbiamo necessariamente controllare la velocità dei motori. In teoria, il sistema più semplice potrebbe sembrare quello di applicare in serie al motore un trimmer (o potenziometro) per variare la tensione di alimentazione:
In pratica questo sistema può funzionare, a patto di utilizzare dei trimmer ad alta dissipazione. Facendo riferimento allo schema precedente, per alimentare un motore da 3V - 0,5A con una tensione di 6V dovremmo impiegare una resistenza da 6 Ohm. Infatti (6V - 3V) / 0,5A = 6 Ohm La potenza di dissipazione di questa resistenza dovrebbe essere: 0,5A x 0,5A x 6 Ohm = 1,5W Una soluzione migliore consiste nell'utilizzare come resistenza variabile un transistor di potenza (o un darlington), regolando la polarizzazione di base con un piccolo trimmer (o potenziometro), come nello schema qui sotto:
Questo sistema ha il pregio di essere molto semplice, ma è poco efficiente. Infatti:
PULSE WIDTH MODULATION Possiamo facilmente ed efficacemente controllare la velocità di un motore con un circuito chiamato PWM (pulse width modulation). Con questo sistema la velocità del motore non viene regolata variando la tensione, ma variando il tempo durante il quale l'intera tensione di alimentazione viene applicata ai terminali del motore. Un oscillatore produce un'onda quadra a duty cycle variabile con cui pilotiamo la base di Q1: più lunga sarà la semionda positiva, più tempo Q1 resterà in conduzione, più veloce girerà il motore.
Questo circuito permette:
NB: per quanto riguarda la caduta di tensione introdotta da Q1 e la variazione del senso di rotazione, vale quanto detto in precedenza. PWM E MINIROBOT Per applicare questo tipo di circuito al nostro robot, basta pilotare un ingresso del ponte H con l'onda quadra a duty cycle variabile fornita dall'oscillatore. La variazione del duty cycle ci permette di variare la velocità, mentre cambiando il livello logico applicato sull'altro ingresso del ponte controlliamo il senso di rotazione del motore.
Qui sotto è riportato lo schema del circuito. Con i valori indicati, la frequenza dell'oscillatore è di circa 20KHz. Sono sconsigliate frequenze più basse, se non volete che i vostri motori emettano fischi a frequenza udibile.
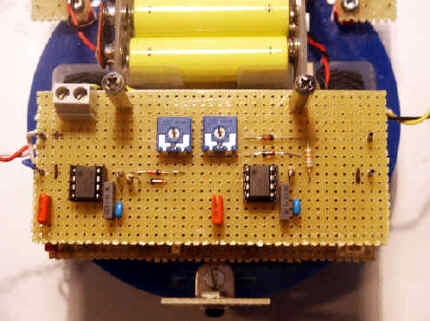
Ruotando il trimmer è possibile variare la tensione all'uscita del ponte da ~0V a +VBatt. Questo permette di regolare la velocità o di adattare la nostra piattaforma a motori che hanno rendimenti diversi. Usiamo il livello logico applicato sull'ingresso IN (ad esempio il segnale proveniente da un sensore) per cambiare la direzione del motore. SCHEMA DI MONTAGGIO
WEB MODIFICHE Con l'aggiunta di un inverter, possiamo realizzare un circuito che ci permette di controllare non solo la velocità, ma anche la direzione del motore con lo stesso trimmer (o potenziometro). Quando il potenziometro è in posizione centrale, il motore è fermo. Ruotando il potenziometro in un senso o nell'altro il motore cambia direzione.
Questo circuito può essere impiegato, tra l'altro, per alimentare dei trenini elettrici. Usando un potenziometro "slider" potremo facilmente controllare velocità e senso di marcia del nostro modello. COLLEGAMENTO DEL PWM SUL TERMINALE "ENABLE"
Con questo circuito l'oscillatore PWM viene (più correttamente) collegato a un terminale ENABLE. I due piedini A e B vengono collegati al +V tramite due resistenze di pull-up da 10K e servono per controllare la direzione del motore.
VEDI anche |
|||||||||||||||