|
UN MINIROBOT CHE TUTTI POSSONO COSTRUIRE (2) |
|
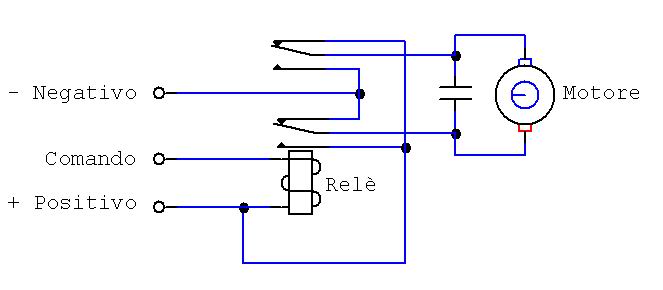
CIRCUITO DI CONTROLLO-MOTORI A RELÉ Questo circuito è stato pensato per tutti quelli che non hanno ancora preso dimestichezza col saldatore e con lo stagno. Fare saldature sui piedini di un integrato che sono distanziati solo di 2,54 mm non è una cosa semplice, specialmente se uno è alle prime armi. A meno che non vogliate rimanere tutta la vita degli hobbisti passivi che si limitano ad assemblare schede già fatte, prima o poi dovrete imparare a saldare. Nel frattempo però potete cominciare a divertirvi costruendo un robottino e utilizzando il circuito che segue per controllare i motori:
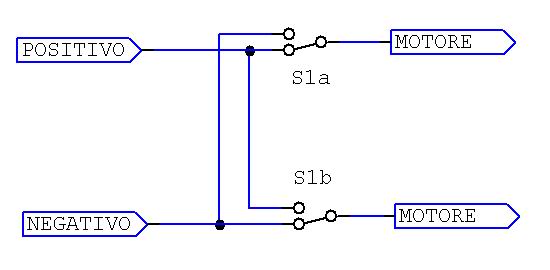
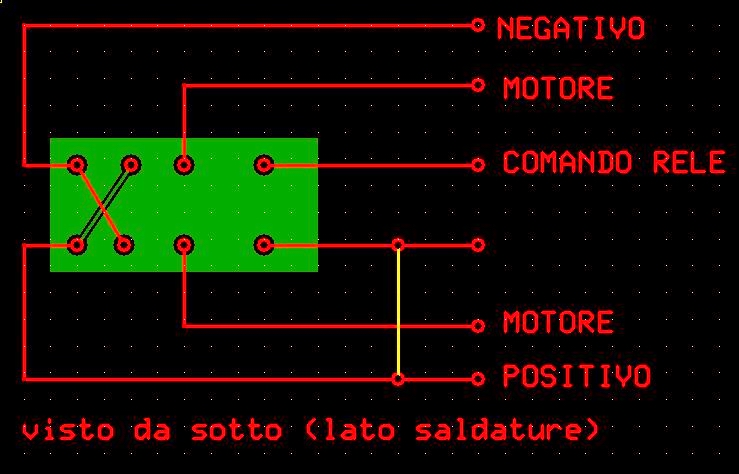
Clicca qui per vedere il layout di montaggio Come si vede nello schema, il circuito fa uso di un relè (5V - doppio scambio), il che semplifica notevolmente il lavoro di saldatura e di montaggio. Non appena il relè viene eccitato da un impulso di comando negativo (proveniente, per esempio, da un sensore) si scambiano le polarità sul motore e si inverte il senso di marcia, come si vede nello schema semplificato:
COME FUNZIONA? Premessa: quando in un motorino CC (= corrente continua) invertiamo le polarità dell'alimentazione, il motore cambia il senso di rotazione.
ATTENZIONE: la piedinatura del relè potrebbe cambiare secondo il modello. Controllate il disegno stampigliato sul corpo del relè o il datasheet (quando è reperibile). Se non riuscite, seguite la procedura seguente:
Una volta montato il circuito, provate a collegare il terminale COMANDO al negativo: il relè deve eccitarsi e il motore deve invertire la direzione di marcia. Scollegando il terminale COMANDO dal negativo il relè deve diseccitarsi. Per il nostro robot servono 2 relè, uno per ogni motore.
|

{kind=link}