VALENTINO BRAITENBERG, I
veicoli pensanti. Saggio di psicologia sintetica, Mimesis
2007
«La giustificazione scientifica
di ciascun modello è fornita dalle ricerche compiute su esseri
viventi (dalla mosca all'uomo)»
MARIO G. LOSANO, Storie di
automi. Dalla Grecia classica alla Belle Epoque, Einaudi
1990
«La storia
degli automi, dalle origini greche fino al 1930, contiene anche
le "storie" degli automi, cioè le biografie di queste creature
meccaniche»
YURI
CASTELFRANCHI - OLIVIERO STOCK, Macchine come noi. La
scommessa dell'intelligenza artificiale, Laterza 2000
«L'avventura
emozionante dell'intelligenza artificiale, dagli automi del
passato, del mito e della fantascienza ai più sofisticati robot
di oggi, dai primi 'cervelli elettronici' alle moderne reti
neurali»
AA.VV., Intelligenza
artificiale. Dal test di Turing alle macchine pensanti, Le
Scienze 2005
«L'espressione "intelligenza
artificiale" è nata negli anni cinquanta per indicare macchine
che pensano, e in alcuni casi agiscono, come esseri umani»
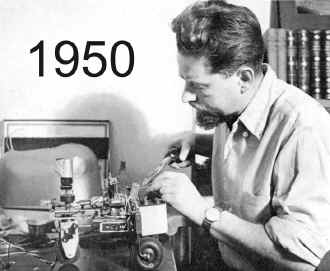
Negli anni '50, mentre
Alan Turing e John Von Neumann concepivano i processi mentali in termini
digitali, Grey Walter sottolineava l'importanza di simulare il
funzionamento del cervello usando circuiti analogici, ispirando
successive generazioni di ricercatori del calibro di Rodney Brooks, Ronald Arkin, Hans
Moravec e Mark Tilden.
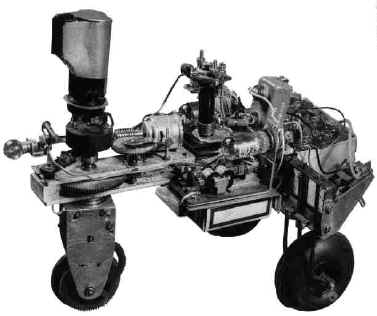
Elmer
&
Elsie
le leggendarie tartarughe
di
Grey
Walter
Ricostruzione
della "tartaruga" con LEGO Mindstorm
VECCHI
LIBRI
L'opera di W.
Grey Walter è illustrata nel libro The Living Brain, pubblicato negli Stati Uniti nel 1953, che «include descrizioni
e schemi dei vari giocattoli elettrici (tra cui la
machina speculatrix
o tartaruga meccanica) che l'Autore stesso ha inventato per
dimostrare le sue teorie».
Il libro è stato tradotto in italiano e pubblicato da
Feltrinelli nel 1957.
PIERRE de LATIL, Il pensiero
artificiale. Introduzione alla cibernetica,
Feltrinelli 1962.
Vi si trova, tra l'altro, lo schema e la spiegazione del
funzionamento della tartaruga di Grey Walter e dell'omeostato di
Ashby.
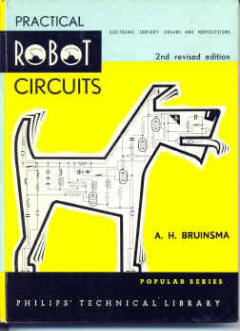
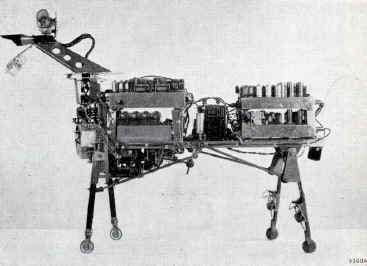
1961:
un "cane" robotico costruito interamente con valvole
termoioniche. Il libro fa parte di una serie di pubblicazioni
tecniche della Philips.
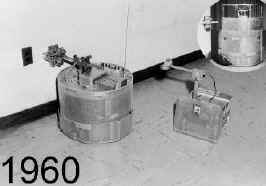
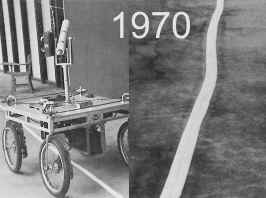
"Beast":
un robot in grado di ricaricare autonomamente le proprie batterie.
VILLIERS DE L'ISLE ADAM,
Eva futura, Bompiani 1966
«Eva futura può
essere letto come un romanzo di anticipazione e come un'analisi, tra le più
profonde, originali e audaci della nostra civiltà. Un'intera generazione e
tutte quelle che da lei discenderanno, non si saranno mai viste più
vituperate, beffate, definitivamente giudicate come in questo libro che
mette in confronto la macchina e l'uomo, per scegliere la macchina»
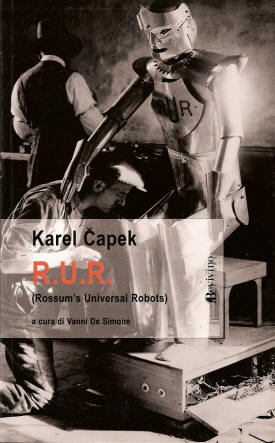
KAREL ČAPEK, R.U.R.
(Rossum Universal Robots), Bevivino 2006
«Scritta nel 1920,
quest'opera teatrale segna l'ingresso nelle lingue di tutto il mondo di un
neologismo che avrà una fortuna inattesa e grandissima: robot»
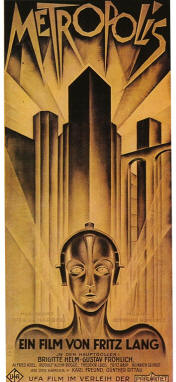
"L'uomo meccanico" è un film italiano del
1921.
Per molti anni si riteneva fosse andato perduto, finché negli anni '70 non
vennero ritrovati 740 metri di pellicola (26 minuti), restaurati nel 1992
dalla Cineteca di Bologna.
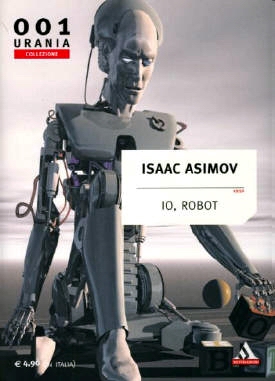
Le Tre leggi della robotica
sono un insieme di leggi scritte da Isaac
Asimov, alle quali obbediscono gran parte dei robot che compaiono nei
suoi racconti:
Un
robot non può recare danno a un essere umano, né può
permettere che, a causa del suo mancato intervento, un
essere umano riceva danno.
Un
robot deve obbedire agli ordini impartiti dagli esseri
umani, purché tali ordini non contravvengano alla Prima
Legge.
Un
robot deve proteggere la propria esistenza, purchè questa
autodifesa non contrasti con
la Prima
e
la Seconda Legge.
Le Tre Leggi apparvero
esplicitamente in Runaround (1942). In seguito
questa ed
altre storie vennero raccolte nell'antologia Io,
Robot.
Le Tre Leggi vennero estese con
una quarta legge, la 'Legge Zero', così chiamata per
mantenere il fatto che una legge con numero più basso soprassiede
a una con numero maggiore.
0. Un robot non può recare
danno all'umanità, né può permettere che, a causa del
proprio mancato intervento, l'umanità riceva danno.
Alle "tre leggi della
robotica" e ad altri romanzi di
Isaac
Asimov si è ispirato il film del 2004 "Io,
Robot" (I, Robot), di Alex Proyas, con Will Smith.
È interessante mettere a
confronto le leggi della robotica di Asimov con quelle formulate
da Mark
Tilden (cfr. Dave Hrynkiw - Mark Tilden, Junkbots,
Bugbots & Bots on Wheels, McGraw-Hill/Osborne, 2002):
Un robot deve proteggere la
sua esistenza a qualunque costo.
Un robot deve ottenere e mantenere l'accesso alle fonti di energia.
Un robot deve continuamente
cercare migliori fonti di energia.