|
UN MINIROBOT CHE TUTTI POSSONO COSTRUIRE (1) |
|
PRIMA
DI COMINCIARE: alcune idee di base Questo progetto:
L'elettronica può essere un modo non banale per divertirsi, imparando e facendo qualcosa di concreto (non è solo virtuale!). Richiede manualità e tanta passione. Ci vuole un po' d'impegno, ma le soddisfazioni e il divertimento ti ripagano ampiamente della fatica. COME È FATTO QUESTO MINIROBOT Il minirobot si compone di 6 parti:
Il MiniRobot che
costruirete sarà in grado di "navigare" in un ambiente,
cambiando direzione quando incontra un ostacolo. Le dimensioni del telaio dipendono dal tipo di motori e di ruote che siete riusciti a procurarvi. Quindi: cominciate a comprare motori e ruote, poi costruite la base. Per costruire il telaio potete usare il materiale che più vi piace: legno, plastica, compensato, metallo, ecc. Nei negozi di bricolage si vendono dei pezzi metallici preforati dello spessore di ca. 3 mm. Questo li rende molto robusti e resistenti, ma allo stesso tempo pesanti e difficili da forare. Anche i pezzi del Meccano sono molto adatti allo scopo. Al contrario il cartone è assolutamente sconsigliato. Quello che conta è che la struttura sia solida. Per ottenere questo bisogna fare bene i conti: l'altezza della ruota pivottante, la posizione dei motori e il diametro delle ruote deve essere tale che il minirobot stia perfettamente in piano.
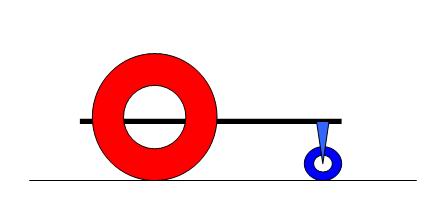
La forma più usata è una specie di T come nel disegno che segue:
Se proprio siete disperati, prendete una scatola di plastica o di legno, capovolgetela e usatela come telaio, collocando motori e pile all'interno e facendo due buchi per far uscire gli alberi del motore e attaccare le ruote:
La terza ruota può essere facilmente comprata con pochi soldi in un negozio di bricolage. Si tratta di quelle ruote che vengono usate per carrelli, poltrone, tavolini, ecc. Vengono chiamate "ruote pivottanti" perché l'asse di rotazione può girare di 360° attorno all'asse verticale.
In alternativa alle ruote pivottanti potete usare delle sfere come quelle delle foto qui sotto. Ho notato che queste sfere hanno la tendenza a bloccarsi, forse a causa delle particelle di polvere che entrano e provocano attrito e per questo mi sento di sconsigliarle. Comunque, anche le sfere si trovano nei negozi di bricolage.
Qualcuno usa anche un semplice perno filettato con un dado cieco o un pomello a un'estremità, ma in questo caso l'attrito con la superficie di contatto è molto elevato. Inoltre se la superficie presenta delle irregolarità (buchi o fessure) il dado/pomello tende a incastrarsi, bloccando la navigazione del robot. Sconsigliato.
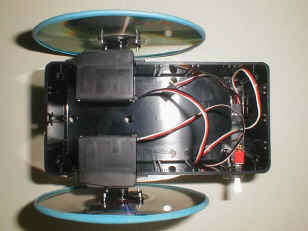
I motori devono essere dotati di ingranaggi. Infatti l'ingranaggio trasforma la velocità del motore in potenza, permettendo di trasportare il carico (pile, circuito e il telaio stesso). I primi hobbysti usavano dei servomotori da modellismo modificati, in modo che l'albero potesse compiere una rotazione completa di 360°. La modifica dei servomotori è però una operazione molto delicata (vedi qui). In alternativa potete acquistare dei motori già muniti di ingranaggi: ce ne sono di molto costosi e di economici (meno di 10 Euro). Fate una ricerca su internet alla voce "motoriduttori" o guardate qui (e qui per le ruote). Un sistema ancora più economico consiste nello smontare vecchi giocattoli e recuperare motorini e ruote. Cercate di
scegliere i motori abbinati alle ruote, per non avere problemi a fissare
le ruote sui perni. Su internet si trovano le
cose più strane, persino ruote fatte con dei vecchi CDRom: l'importante
è che le ruote siano ben fissate al perno dei motori! Il numero di batterie dipende dal tipo di motori che avete montato sul minirobot. Ad esempio, se usate dei motori da 6 Volt dovete utilizzare un'alimentazione di 6 Volt che si può ottenere con 4 batterie da 1,5V poste in serie (1,5 x 4 = 6). Per tenere insieme le batterie potete utilizzare gli appositi portabatterie:
Qualcuno potrebbe pensare di usare delle batterie ricaricabili, oggi facilmente reperibili anche nei supermarket. In questo caso tenete presente che ogni batteria ricaricabile eroga 1,2 Volt e se quindi dovete ottenere 6 Volt ve ne occorrono 5 (1,2 x 5 = 6) e non 4 come per le batterie "normali" (non ricaricabili). State attenti di fissare il portapile in un posto "comodo", in modo da poter facilmente cambiare le pile quando si scaricheranno. Se avete spazio, lo potete fissare sotto al minirobot, in modo però che non tocchi e non faccia attrito (vedi NOTA). Per altre informazioni
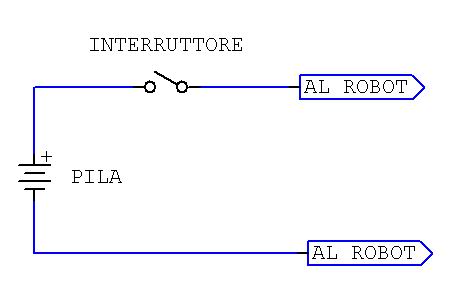
sull'alimentazione, vedi http://digilander.libero.it/beamweb/alimentazione1.htm L'interruttore serve per accendere e spegnere il robot. Potete usare qualsiasi tipo di interruttore: a slitta, a levetta, a pulsante, ecc. Anche l'interruttore va fissato in un posto dove sia facile azionarlo, per accendere e spegnere il minirobot. L'interruttore va collegato in serie al portapile, in modo da interrompere il filo del positivo:
Ricordatevi che il positivo ( + ) è indicato dal colore ROSSO e il negativo ( - ) dal colore NERO. Usate fili di questo colore per non confondervi.
|
|
Per eventuali chiarimenti o informazioni inviate una email. |