|
Pezzi: 270
Larghezza: cm. 13,18
Profondità: cm. 19,10
Altezza: cm. 14,13
Peso (senza batterie): 325 gr.
Peso (con batteria 9V): 370 gr.
Kit: LEGO® Robotics Invention System 2.0
Serie: LEGO® MINDSTORM
Componenti elettrici: n.2 motori.
Pezzi aggiuntivi:
pezzi lego technic, Battery Box Small 9V,
pezzi lego pneumatic
(Cylinder old style, Pneumatic Switch, Pneumatic Airtank,
Pneumatic hose diam. 4mm.), n.4 Ventose trasparenti
|
NEW
Visita la nostra pagina su
Brickshelf
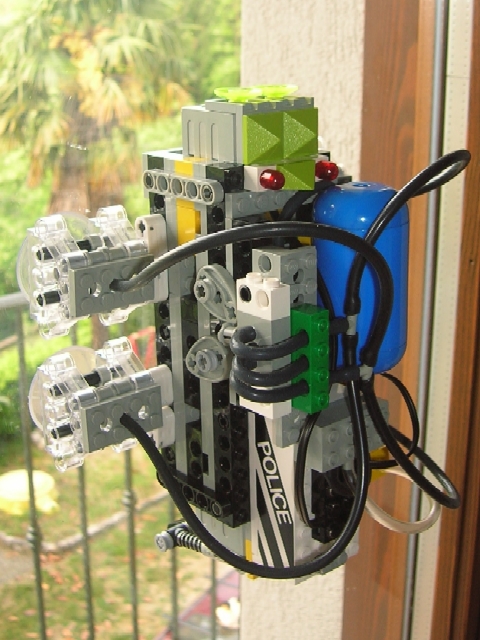
 BABYGEKI è un robot quadrupede provvisto di ventose, che grazie al vuoto creato da un cilindro pneumatico (utilizzato come pompa) può arrampicarsi su superfici liscie verticali (vetri, armadi, etc..).
BABYGEKI è un robot quadrupede provvisto di ventose, che grazie al vuoto creato da un cilindro pneumatico (utilizzato come pompa) può arrampicarsi su superfici liscie verticali (vetri, armadi, etc..).
Lo abbiamo costruito prendendo spunto da GEKY
ma con nuove interessanti caratteristiche e miglioramenti:
* Utilizzo di un Battery Box Small 9V al posto dell'RCX per alimentare il Robot.
* Riduzione del n° dei pezzi (da 392 a 270).
* Riduzione del peso (da 740 a 370 gr.) (completo di batteria).
* Riduzione del passo e della velocità di avanzamento.
* Parte pneumatica per creare il vuoto completamente a bordo del Robot.
BABYGEKI è stato costruito utilizzando il KIT LEGO® Robotics Invention System 2.0 della serie LEGO® MINDSTORM e alcuni pezzi aggiuntivi.
In particolare sono stati utlizzati pezzi Lego Pneumatic e un Battery Box Small 9V.
 Il Robot è composto dal gruppo di alimentazione, da una base con all'interno i motori e gli ingranaggi necessari per il funzionamento, da 4 piedi ai quali sono montate le ventose, e dalla parte
pneumatica che permette di creare il vuoto.
Il Robot è composto dal gruppo di alimentazione, da una base con all'interno i motori e gli ingranaggi necessari per il funzionamento, da 4 piedi ai quali sono montate le ventose, e dalla parte
pneumatica che permette di creare il vuoto.
Clicca qui per visualizzare lo schema pneumatico completo e la descrizione del funzionamento.
Gruppo di alimentazione: A differenza degli altri Robot che abbiamo costruito e che avevano l'RCX come modulo di alimentazione, per BABYGEKI abbiamo usato un semplice Battery Box con una sola batteria da 9V. Questo ci ha permesso di ridurre notevolmente la dimensione e il peso complessivo (BABYGEKI pesa la metà di GEKY), migliorando la tenuta delle ventose.
Ovviamente il Robot non può essere programmato non avendo l'unità RCX, ma in questo caso non è necessario dato che deve soltanto muoversi in una direzione.
BASE: E' la struttura portante di tutto il robot sulla quale sono montati i motori e gli ingranaggi per il movimento, lo switch pneumatico, un carrello posteriore ammortizzato e la parte
pneumatica.
I MOTORI sono azionati simultaneamente per avere una maggiore coppia ed inoltre sono meccanicamente collegati dal sistema di trasmissione ad ingranaggi.

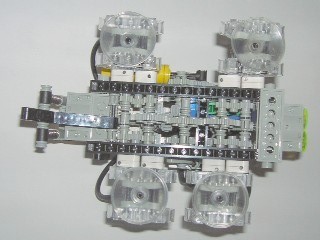 Il SISTEMA DI TRASMISSIONE (unico per tutti e quattro i piedi) è realizzato con ingranaggi di diverse dimensioni e due viti senza fine. Il rapporto di trasmissione è di 1/24 in quanto è generato dalle viti senza fine abbinate a degli ingranaggi da 24 denti. Questo rapporto permettere di avere una buona coppia e una velocità di avanzamento non molto alta. La velocità è minore rispetto a GEKY sia per il rapporto di trasmissione che per il passo (più corto) del Robot.
Il SISTEMA DI TRASMISSIONE (unico per tutti e quattro i piedi) è realizzato con ingranaggi di diverse dimensioni e due viti senza fine. Il rapporto di trasmissione è di 1/24 in quanto è generato dalle viti senza fine abbinate a degli ingranaggi da 24 denti. Questo rapporto permettere di avere una buona coppia e una velocità di avanzamento non molto alta. La velocità è minore rispetto a GEKY sia per il rapporto di trasmissione che per il passo (più corto) del Robot.
Lo stesso rapporto (1/24) permette il movimento delle camme posizionate lateralmente al robot che azionano lo SWITCH PNEUMATICO.
Clicca qui per maggiori informazioni.
La posizione delle camme indicata nel modello CAD
è quella utilizzata anche nel modello reale, ma è importante che sia perfettamente sincronizzata con i piedi.
E' probabile trovare qualche difficoltà nel sincronizzare il tutto, ma con un pò di pazienza si riesce a farlo funzionare perfettamente (.... se ci siamo riusciti noi ....).
 Il CARRELLO POSTERIORE funziona come ammortizzatore e garantisce al robot un movimento/avanzamento più dolce e lineare.
Il CARRELLO POSTERIORE funziona come ammortizzatore e garantisce al robot un movimento/avanzamento più dolce e lineare.
La PARTE PNEUMATICA crea il vuoto, che viene "immagazzinato" nell' Airtank per poi essere alternativamente inviato alle ventose posizionate sui piedi del robot.
Una delle difficoltà incontrate è stata proprio quella di trovare ventose adatte allo scopo, che fortunatamente abbiamo trovato in un negozio di accessori per animali (sono usate per gli acquari).
Per poterle utilizzare abbiamo forato la parte centrale e inserito un tubetto di plastica, bloccando il tutto con colla per modellismo. In questo modo la ventosa è risultata pronta per essere montata sui piedi del robot.

 Nel progetto di questo robot il cilindro pneumatico per creare il vuoto (utilizzato come pompa), è montato sul robot ed è azionato automaticamente grazie ad alcuni ingranaggi posti nella parte laterale destra del Robot. Questo rende BABYGEKI completamente autonomo.
Nel progetto di questo robot il cilindro pneumatico per creare il vuoto (utilizzato come pompa), è montato sul robot ed è azionato automaticamente grazie ad alcuni ingranaggi posti nella parte laterale destra del Robot. Questo rende BABYGEKI completamente autonomo.
PIEDI: Sono stati progettati per inserire correttamente le ventose. E' probabile che siano necessari piccoli adattamenti a seconda del tipo di ventosa che si intende utilizzare.
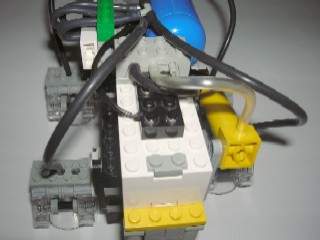
Un problema riscontrato durante i primi collaudi è stato il distacco dei piedi dal corpo del robot, a causa dello sforzo necessario per "staccare" le ventose. Per risolvere il problema abbiamo praticato dei fori passanti (vedi foto) ed inserito dei piccoli chiodi.
Per dare un aspetto da insetto a BABYGEKI, nella parte anteriore abbiamo montato due antenne e due luci rosse (gli occhi) che possono rimanere fisse o lampeggianti a seconda di come si montano.
Note importanti per il corretto funzionamento di BABYGEKI:
- Innanzitutto accertatevi del corretto funzionamento di: motori, trasmissione, piedi, switch pneumatico e pompa del vuoto.
- I primi collaudi effettuateli su una superficie orizzontale, inclinandola successivamente sino ad arrivare alla posizione verticale.
- Appoggiate BABYGEKI sulla superficie verticale e azionate l'interruttore del Battery Box.
- Accompagnate BABYGEKI per qualche passo, dopo di che lasciatelo avanzare autonomamente.
- A questo punto ..... godetevi lo spettacolo ........
- Se ci siete riusciti vi auguriamo !!!!!!!!! BUON DIVERTIMENTO !!!!!!!!!!!. Valter e Samuele
|



