|
Pezzi: 384
Larghezza: cm. 13,46
Profondità: cm. 36,05
Altezza: cm. 22,15
Peso (senza batterie): 630 gr.
Peso (con 6 batterie AA): 790 gr.
Kit: LEGO® Robotics Invention System 2.0
Serie: LEGO® MINDSTORM
Componenti elettrici: n.1 RCX 2.0, n.2 sensori di contatto,
n.1 sensore ottico, n.2 motori
Pezzi aggiuntivi:
My ANGLE SENSOR 100Kohm
|
NEW
Visita la nostra pagina su
Brickshelf
ROBOT ANGLE SENSOR è stato costruito prendendo spunto dalla CONSTRUCTOPEDIA presente nel KIT LEGO® Robotics Invention System 2.0 della serie LEGO® MINDSTORM.
Si tratta di una GRU che ricerca e riconosce un pezzo scuro (es. Brick 2x4 Lego Nero), lo raccoglie per poi depositarlo in una nuova posizione.
Il Robot è composto dal BRICK di controllo RCX 2.0, da una base all'interno della quale è montato il
My ANGLE SENSOR 100Kohm, da un
braccio che si alza-abbassa-ruota, e da una mano che si apre-chiude per raccogliere il pezzo, sulla quale è montato il sensore ottico.
 RCX 2.0: E' l'unità di controllo (computer) di tutto il Robot che con il programma software gestisce motori, sensori e quindi il completo funzionamento di ROBOT ANGLE SENSOR. Per questo progetto è stato utilizzato un software sviluppato con (NQC BricxCC).
RCX 2.0: E' l'unità di controllo (computer) di tutto il Robot che con il programma software gestisce motori, sensori e quindi il completo funzionamento di ROBOT ANGLE SENSOR. Per questo progetto è stato utilizzato un software sviluppato con (NQC BricxCC).
BASE: E' la parte che permette a ROBOT ANGLE SENSOR di ruotare, grazie al primo motore.
MY ANGLE SENSOR 100Kohm:
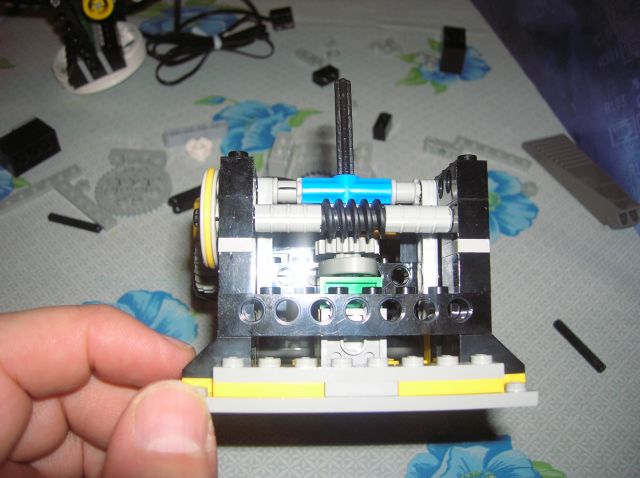 Il sensore che si trova all'interno della BASE è montato in asse con il braccio rotante della gru e ne rileva la posizione assoluta (da -135° a +135°).
Il sensore che si trova all'interno della BASE è montato in asse con il braccio rotante della gru e ne rileva la posizione assoluta (da -135° a +135°).
Con opportuni accorgimenti software permette di controllare in modo preciso la rotazione evitando ad esempio di dover utilizzare dei tempi per controllare la rotazione a destra-sinistra.
In particolare è molto utile per conoscere la posizione centrale (o iniziale) e cioè 0°.
BRACCIO: Il braccio della gru oltre a ruotare, si alza-abbassa grazie al secondo motore (montato sul retro).
La posizione alta è controllata con un sensore di contatto.
Anche la posizione bassa è controllata da un sensore di contatto, ma questo è azionato solo dopo che la
mano della gru si è aperta completamente.
Il braccio inizia ad alzarsi solo se la mano è completamente chiusa.
MANO: La mano della gru si apre-chiude utilizzando lo stesso motore che permette al braccio di alzarsi-abbassarsi.
Nella parte bassa è montato il sensore ottico che permette di riconoscere un pezzo scuro.
N.B. è importante analizzare come il software gestisce il riconoscimento:
- Il braccio della gru si abbassa fino 1-2 cm. dal piano
- Viene misurata e registrata la luce ambiente
- Viene impostato il valore di lettura per il pezzo scuro
- La gru esegue 3 rotazioni per cercare il pezzo scuro
- Se non viene trovato il pezzo scuro - posizione iniziale - FINE Programma
- Se viene trovato il pezzo scuro - raccolta - deposito - posizione iniziale - FINE Programma
|



