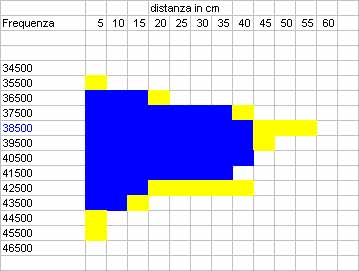
Ciascun sensore infrarossi è costituito da un diodo emettitore ed un ricevitore IR. Il diodo emette luce infrarossa, non visibile ad occhio nudo, ad una frequenza attorno ai 38,5 KHz che si propagano nella direzione del suo puntamento; incontrando un oggetto fino ad una distanza massima di 40 cm, vengono riflessi e catturati dal ricevitore IR.
In teoria calcolando il tempo trascorso tra l'emissione e la ricezione, si riesce a calcolare la distanza dell'ostacolo, ma, all'atto pratico, questo non è risultato un metodo affidabile.
I led sono inseriti in un cilindretto di plastica per meglio convogliare la luce IR.
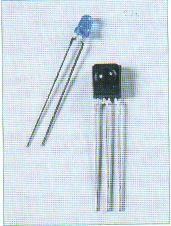
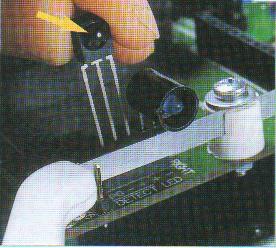
particolare del diodo e ricevitore IR e loro montaggio
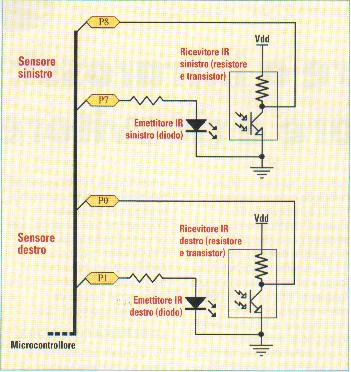
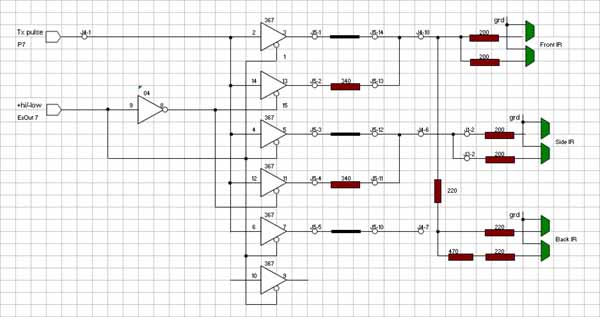
Quì a fianco lo schema circuitale originale dei due sensori IR frontali (in seguito è stato modificato).
Per ciascun sensore viene utilizzata una porta del processore per l'emissione della luce ed un'altra porta per leggere il ricevitore.